Control Algorithm
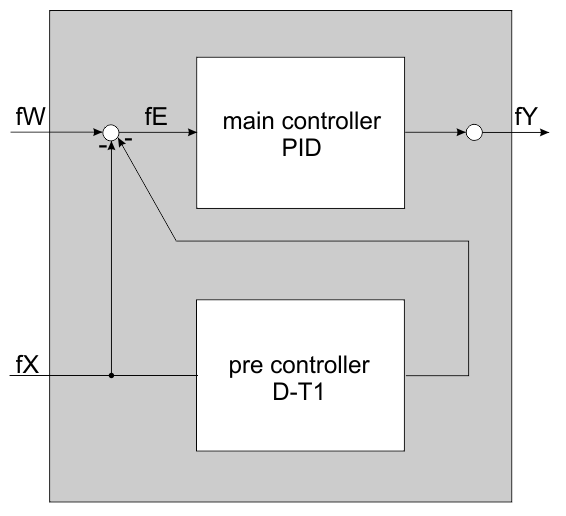
The heart of the TwinCAT Temperature Controller is a standard PID controller. This controller kernel also supports anti-reset windup measures to limit the I-component if the control value is subjected to limiting. Since the controller has been designed to minimize disturbances using the adjusting procedure according to Chien, Hrones and Reswick, overshoot is possible when the set point is changed. In order to reduce such overshoot, a pre-controller can be inserted to handle changes in the set point. The pre-controller has a D-T1 characteristic, and reduces ringing in the controller as a whole. Since the D component of the pre-controller has the effect of "roughening" the control value, the use of a pre-controller must be considered very carefully. The pre-controller is switched off when the actual value enters within a certain range of the setpoint and remains there for some length of time. The pre-controller is switched off by ramping it down over a considerable period of time. To minimize oscillation of the control value, it is optionally possible to follow the main controller with a filter. P-T1 and moving average filters are available for this purpose.
Requirements
Development environment | Target platform | PLC libraries to include |
|---|---|---|
TwinCAT 3.1.4016 | PC or CX | Tc2_TempController |