Disturbance Compensation
Disturbance compensation
A disturbance signal has a considerable influence on the quality of the controller and perhaps on the controlled process. A PID controller can passively counter the effect of an interference signal by increasing the controller output. However, this is an inefficient way of compensating.
The function block FB_CTRL_TempController_DistComp offers an additional lead/lag compensation to actively compensate an interference signal. It is assumed that the interference signal in question is measured and fed into the function block. The following block diagram explains the structure of the disturbance compensation:
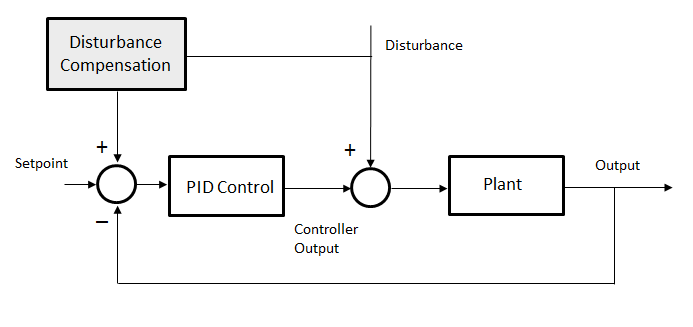
The disturbance compensation is a lead/lag compensator. A lead/lag compensator is a versatile component that can be used to set up I, D, PI, PD, and PID compensations provided the gain and time constants are carefully selected. With the help of the compensator, permanent deviations and peaks can be reduced and the dynamic behavior in case of interference can be improved. Here you can find further information about the lead/lag compensator.