FB_CTRL_SERVO_MOTOR_SIMULATION
The behavior of an actuator can be simulated with this function block.
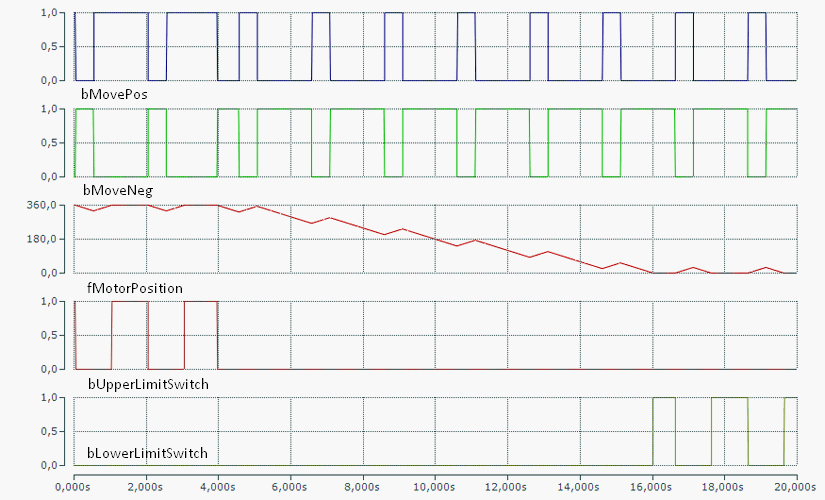
Behavior of the output
 Inputs
Inputs
VAR_INPUT
bMovePos : BOOL;
bMoveNeg : BOOL;
fManSyncValue : FLOAT;
bSync : BOOL;
eMode : E_CTRL_MODE;
END_VAR Name | Type | Description |
|---|---|---|
bMovePos | BOOL | Input that moves the simulated actuator in the positive direction. |
bMoveNeg | BOOL | Input that moves the simulated actuator in the negative direction. |
fManSyncValue | FLOAT | Input with which the simulated motor position can be set, or the value to which movement takes place in manual mode. |
bSync | BOOL | A rising edge at this input sets the simulated motor position to the value "fManSyncValue". |
eMode | E_CTRL_MODE | Input that specifies the operation mode of the function block. |
 Outputs
Outputs
VAR_OUTPUT
fMotorPositon : FLOAT;
fMotorState : FLOAT;
bUpperLimitSwitch : BOOL;
bLowerLimitSwitch : BOOL;
eState : E_CTRL_STATE;
eErrorId : E_CTRL_ERRORCODES;
bError : BOOL;
END_VARName | Type | Description |
|---|---|---|
fMotorPositon | FLOAT | Simulated motor position in the range [ fMovingRangeMin ... fMovingRangeMax ] |
fMotorState | FLOAT | Simulated motor position in the range [ 0 … 100.0 ] |
bUpperLimit | BOOL | Simulated limit switch at the actuator's positive stop |
bLowerLimit | BOOL | Simulated limit switch at the actuator's negative stop. |
eState | E_CTRL_ | State of the function block |
eErrorId | E_CTRL_ERRORCODES | Supplies the error number when the output |
bError | BOOL | Becomes TRUE, as soon as an error occurs. |
 Inputs/ outputs
Inputs/ outputs
VAR_IN_OUT
stParams : ST_CTRL_SERVO_MOTOR_SIMULATION_PARAMS;
END_VARName | Type | Description |
|---|---|---|
stParams | ST_CTRL_ | Parameter structure of the function block |
stParams consists of the following elements:
TYPE ST_CTRL_SERVO_MOTOR_SIMULATION_PARAMS:
STRUCT
tCtrlCycleTime : TIME := T#0ms;
tTaskCycleTime : TIME := T#0ms;
fMovingRangeMin : FLOAT := 0;
fMovingRangeMax : FLOAT := 0;
tMovingTime : TIME := T#0ms;
tDeadTime : TIME := T#0ms;
END_STRUCT
END_TYPE Name | Type | Description |
|---|---|---|
tCtrlCycleTime | TIME | Cycle time with which the control loop is processed. This must be greater than or equal to the TaskCycleTime. The function block uses this input value to calculate internally whether the state and the output values have to be updated in the current cycle. |
tTaskCycleTime | TIME | Cycle time with which the function block is called. If the function block is called in every cycle this corresponds to the task cycle time of the calling task. |
fMovingRange | FLOAT | Minimum position of the simulated actuator |
fMovingRange | FLOAT | Maximum position of the simulated actuator |
tMovingTime | TIME | The time required to move the simulated actuator from one stop to the other. |
tDeadTime | TIME | Dead time of the simulated actuator |