Stability conditions
The settings for the system stability limits to be observed during tuning can be made here.
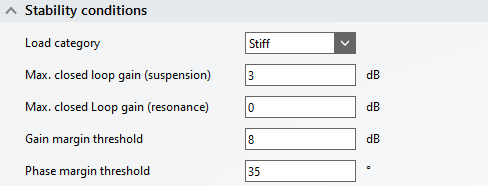
- Load category: Selects a set of typical values for the following parameters. The following preconfigured sets are available:
- Stiff: Limit values for stiffly connected mass in the system; direct system response expected. Direct drive (e.g. torque or linear motor), spindle, low-backlash planetary gear unit.
- Medium: Limit values for medium-strength connected masses in the system. Rack and pinion, short toothed belts, flexible couplings.
- Soft: Limit values for softly connected mass in the system; late system response expected. Long toothed belts, chain drives, long shafts, elastic systems (e.g. rubber/elastomer couplings).
- Max. closed loop gain (suspension): Maximum permissible gain in the frequency range below the first antiresonance.
- Max. closed loop gain (resonance): Maximum permissible gain in the frequency range above the first antiresonance.
- Gain margin threshold: Sets the gain margin to be maintained. The frequency corresponds to the point at which the phase response of the open loop phase falls below the value -180°.
- Phase margin threshold: Sets the phase margin to be maintained. The frequency corresponds to the point at which the open loop gain falls below the value of 0 dB.