Build for different platforms
On the TC Build tab, you can adjust various settings to specify which compiler to use for each target system platform.
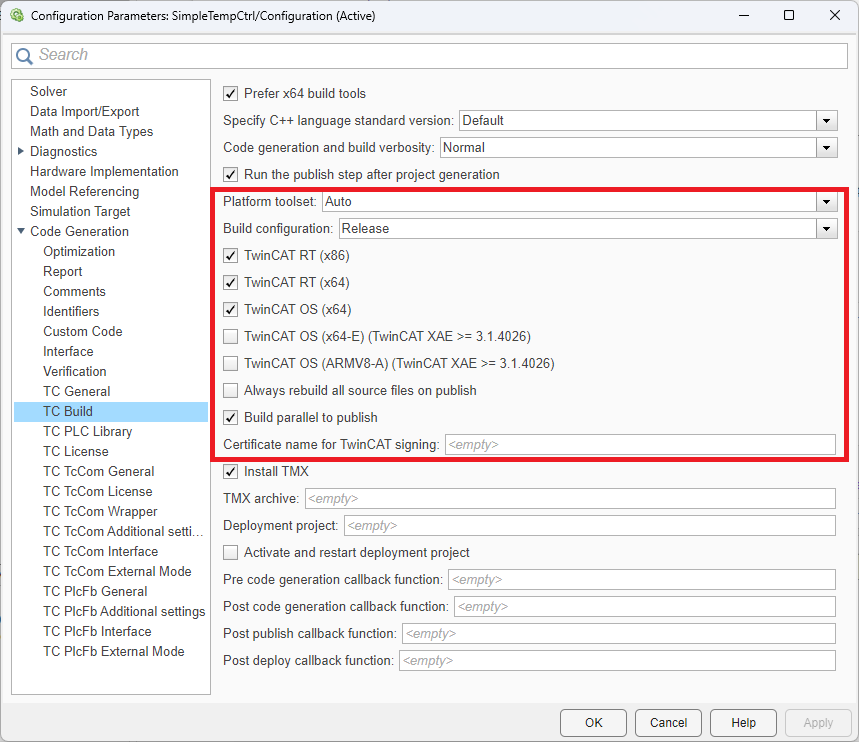
Platform toolset:
The default “Auto” always uses the latest version. A specific version can also be selected from the drop-down menu.
 | Related versions Microsoft Visual C++ 14.1 => VS 2017 |
Build configuration:
Build release or debug driver. Please note that a debug driver usually has a significantly slower execution time on the target system.
Always rebuild all source files on publish:
Simulink® Coder™ and the TwinCAT Target for Simulink® cache some files to speed up the process for repeated builds. Select this parameter so that all source files are always rebuilt.
Build parallel to publish:
When multiple build platforms are selected, the compilation processes are independent of each other and executed sequentially. Activating this option causes all build processes to be executed in parallel on your engineering system. Parallelization is performed by the operating system. To avoid unnecessary waiting times, only create binaries for the platforms you use.
Certificate name for TwinCAT signing
If not specified via an environment variable, enter your OEM certificate level 2 here to sign the created binaries, see Setting up driver signing.
TwinCAT RT (x86)
Select this platform to build binaries for a target system with the following specifications: Intel® or AMD CPU, Windows 32-bit operating system (TwinCAT platform level 40 and higher).
TwinCAT RT (x64)
Select this platform to build binaries for a target system with the following specifications: Intel® or AMD CPU, Windows 64-bit operating system (TwinCAT platform level 40 and higher).
TwinCAT OS (x64)
Select this platform to build binaries for a target system with the following specifications: Intel® or AMD CPU, TwinCAT/BSD operating system (TwinCAT platform level 40 and higher).
Furthermore, this platform must be selected for execution with the TwinCAT Usermode Runtime.
TwinCAT OS (ARMV8-A)
Select this platform to build binaries for a target system with the following specifications: Arm® Cortex®-A CPU, Beckhoff RT Linux® operating system (TwinCAT platform level 20 and 30). Currently explicitly for the devices CX82xx and CX9240.
Notes on Beckhoff Real-Time Linux®
| Driver signing for Beckhoff RT Linux® not required No driver signing is required for Beckhoff RT-Linux®. This is mandatory for all other platforms. |
To support the TwinCAT OS (ARMV8-A) and TwinCAT OS (x64-E) platforms, the MSBuild Support for llvm (clang-cl) toolset component is required when installing Visual Studio. This must be selected manually during the installation of Visual Studio.
The TwinCAT OS (ARMV8-A) and TwinCAT OS (x64-E) platforms are only supported with TwinCAT 3.1. build 4026.
Please note that no debugger can currently be attached under TwinCAT Real-Time Linux®.