ADS Interface
Acyclic data can be transmitted to or from the EtherCAT device via ADS-Read or ADS-Write commands. It possible to communicate with the mailboxes of EtherCAT slave devices via ADS. Every EtherCAT device has its own Net-ID. The port depends on the individual Ads service :
Port | Description |
|---|---|
65535 (0xFFFF) | General Ads services handled by the master directly. |
0x1 - 0xFFFE (fixed address of a slave device) | This is an Ads services directed at an individual slave device. The port number is the same as the EtherCAT address |
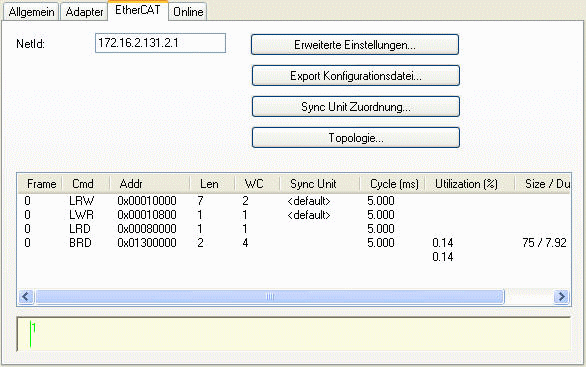
The NetId can be found in the edit field "NetId" on the EtherCAT tab of the EtherCAT master device:
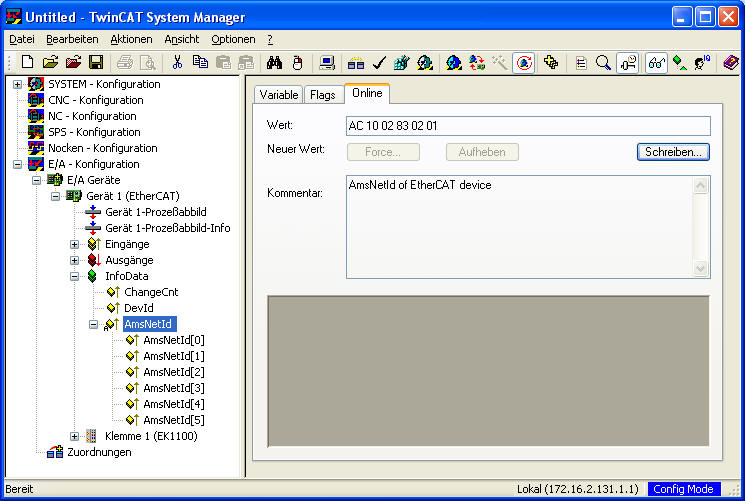
The NetId can also be read out from the variable InfoData.AmsNetId:
Master Ads Port (0xFFFF)
The following table lists the Ads commands supported by the EtherCAT master port(0xFFFF):
Index Group | Index Offset | Access | Data type | Description |
|---|---|---|---|---|
0x00000003 | 0x00000100 | R | UINT16 | Returns current state of master. Following values are returned by this service:
0x0000: Init State |
0x00000003 | requested state | W |
| Request State from master. |
0x00000006 | 0x00000000 | R | UINT16 | Returns the number of projected slaves. |
0x00000007 | 0x00000000 | R | UINT16[nSlaves] | Returns the fixed addresses of all slaves. |
0x00000009 | 0x00000000 | R | { | Returns the EtherCAT status and the Link status of all Slaves: |
BYTE | EtherCAT state of a slave. The state can adopt one of the following values:
0x0000: Init State Additionally following bits can be set: | |||
BYTE | Link status of an EtherCAT slave. The Link status can consist of an ORing of the following bits:
0x0000: Link ok. exampe: 0x0024 = Missing Link at port B. | |||
}[nSlaves] |
| |||
0x00000009 | 0x00000001-0x0000FFFF (EtherCAT slave address) | R | { | Returns the EtherCAT status of the EtherCAT slave specified in the index offset. |
BYTE | EtherCAT state of a slave. The state can adopt one of the following values:
0x0000: Init State Additionally following bits can be set: | |||
BYTE | Link status of an EtherCAT slave. The Link status can consist of an ORing of the following bits:
0x0000: Link ok. exampe: 0x0024 = Missing Link at port B. | |||
} |
| |||
0x00000009 | 0x00000001- 0x0000FFFF (EtherCAT slave address) | W | UINT16 | Request a new state from the selected EtherCAT slave. |
0x00000011 | 0x00000001- 0x0000FFFF (EtherCAT slave address) | R | { | Returns the CANopen identity object of an EtherCAT slave device. |
UINT32 | Vendor Id | |||
UINT32 | Product Code | |||
UINT32 | Revision Number | |||
UINT32 | Serial Number | |||
} |
| |||
0x00000012 | 0x00000000 | R | { | Returns the Crc error counters of all slaves. |
UINT32 | Crc error counter of port A + error counter of port B + | |||
}[nSlaves] |
| |||
0x00000012 | 0x00000001- 0x0000FFFF (EtherCAT slave address) | R | { | Returns the Crc error counters of the EtherCAT slave specified in the index offset. |
UINT32 | Crc error counter of port A. | |||
UINT32 | Crc error counter of port B. | |||
UINT32 | Crc error counter of port C. | |||
UINT32 | Crc error counter of port D. | |||
} |
| |||
0x0000000C | 0 | R | { | Returns frame counters and and lost frame counters |
UINT32 | system time | |||
UINT32 | number of cyclic frames sent by master | |||
UINT32 | number of lost cyclic frames | |||
UINT32 | number of acyclic frames sent by master | |||
UINT32 | number of lost acyclic frames | |||
} |
| |||
0x0000000C | 0 | W |
| Resets the frame counters and lost frames counters |
Slave Ads Port(0x1 - 0xFFFE)
The following table lists the Ads commands that can be sent to an EtherCAT slave device. The port number is same as the fixed address of the slave device:
Index Group | Index Offset | Access | Data type | Description | ||
|---|---|---|---|---|---|---|
CANopen over EtherCAT |
|
|
|
| ||
0x0000F302 | Index and Subindex of an SDO.
HIWORD(0xyyyy0000)= index LOBYTE(0x000000yy)= subindex Example: 0x1c120001: index = 0x1c12
HIBYTE of LOWORD (0x0000yy00): | R/W | UINT8[n] | SDO Upload/Download Request. The object is selected with the index offset. | ||
0x01 | Complete | |||||
0x0000F3FC | List type = HIWORD(0xyyyy0000)
Example 0x00000000: return length of the indiviual list types 0x00010000: return indexes of all objects | R | { | Returns the indexes of the list type specified in the index offset. If 0 is passed as index offset the length of each list type is returned. | ||
UINT16 | list type = 0 :number of list types list type > 0 :list type | |||||
UINT16[n] | list type = 0: length of the list type n+1 list type > 0: length of the selected list | |||||
} |
| |||||
0x0000F3FD | index = HIWORD(0xyyyy0000) | R |
| Get SDO info description | ||
0x0000F3FE | index = HIWORD(0xyyyy0000) subindex = LOBYTE of LOWORD valueInfo = HIBYTE of LOWORD | R |
| Get SDO info entry description | ||
Servo Drive over EtherCAT |
|
|
|
| ||
0x0000F420 | IDN = LOWORD(0x0000yyyy) element = LOBYTE of HIWORD | R/W | UINT8[n] | Upload/Download IDN | ||
0x01 | Data Status | |||||
0x02 | Name (read only) | |||||
0x04 | Attribute | |||||
0x08 | Unit | |||||
0x10 | Minimum | |||||
0x20 | Maximum | |||||
0x40 | Value | |||||
0x80 | Default | |||||
Drive Number = Bits 1-3 of HIBYTE of HIWORD Command Flag = Bit 8 of HIBYTE of HIWORD
| ||||||