Real Time Configuration - Priorities
In addition to the dialogues Settings and Online, contains the Real Time - Configuration area of the TwinCAT System Manager a dialog named Priorities. The dialog displays the priorities of the different tasks inside the TwinCAT System. With enabling of the Expert Mode it is even possible to change the priorities of the tasks, manually.
"Priorities" tab
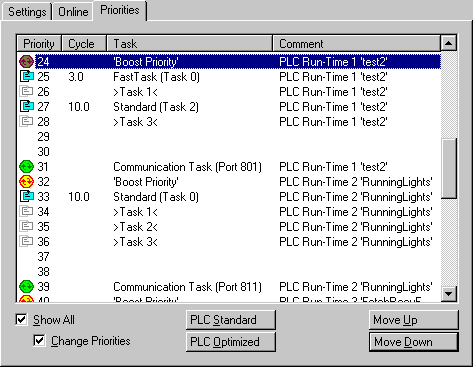
Priority
Each TwinCAT Task has its own Priority in the system. The priority number is shown in this column. The lower the number, the higher the priority of the task. Additionally, each task type has a dedicated icon, shown in front of the number.
Cycle
Task cycle time in milliseconds.
Task
names the job of the task. At PLC tasks, it differs between
- PLC communication Task: This Task serves the ADS communication. To protect PLC data consistency, it should have the lowest priority level, referring to one PLC Run Time System.
- PLC Boost Priority: Priority of a PLC Task, as soon as it is in Monitoring / Debug mode. This Task should have the highest priority, referring to the Tasks of one PLC Run Time System.
- Common TwinCAT Task (light blue icon)
- for currently unused PLC Tasks reserved Priority (e.g. Task 1, 2 and 3 of a PLC Run Time System). The icon is grey (not active).
Comment
Describes the task origin (e.g. PLC Run Time System and project name).
Show All
Shows additionally the unused priorities of the available TwinCAT priorities.
Change Priorities
If Show All is activated, this checkbox enables the manipulation of the Task priorities inside the TwinCAT System.
Move Up
Moves the task priority up the list (and makes it therefore higher prior), if Expert Mode is enabled.
Move Down
Moves the task priority down the list (and makes it therefore lower prior), if Expert Mode is enabled.
PLC Standard
Organizes the priorities of the PLC Tasks like they are staggered by default (all Tasks of the 1st RTS in front of the tasks of the 2nd RTS and so on).
PLC Optimized
Organizes the Task priorities within the TwinCAT Systems in an optimal order in terms of execution of high prior task of different Run Time Systems. Means, the highest priority task of RTS 1 is followed by the Boost Priority Task of RTS 2 and then by the highest priority task of this RTS and so on.
Following picture shows an example of the staggered order for PLC Optimized: