TC_Stop
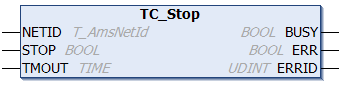
The function block TC_Stop can be used to stop the TwinCAT system. The function corresponds to the Stop command on the TwinCAT system menu (on the right of the Windows taskbar).
 Inputs
Inputs
VAR_INPUT
NETID : T_AmsNetId;
STOP : BOOL;
TMOUT : TIME := DEFAULT_ADS_TIMEOUT;
END_VARName | Type | Description |
|---|---|---|
NETID | T_AmsNetID | A string with the network address of the TwinCAT computer on which the TwinCAT system stop is to be executed can be specified here. If the TwinCAT system to be stopped is on the local computer, an empty string can be entered. |
STOP | BOOL | The function block is enabled by a positive edge at this input. |
TMOUT | TIME | Time-out period that may not be exceeded when executing the ADS command. |
 Outputs
Outputs
VAR_OUTPUT
BUSY : BOOL;
ERR : BOOL;
ERRID : UDINT;
END_VARName | Type | Description |
|---|---|---|
BUSY | BOOL | When the function block is enabled, this output is set and remains set until a feedback is received. |
ERR | BOOL | If an ADS error should occur during the transfer of the command, then this output is set once the BUSY output is reset. |
ERRID | UDINT | Returns the ADS error number when the ERR output is set. |
Requirements
Development environment | Target platform | PLC libraries to be integrated (category group) |
|---|---|---|
TwinCAT v3.1.0 | PC or CX (x86, x64, Arm®) | Tc2_Utilities (System) |