ADSRDDEVINFO
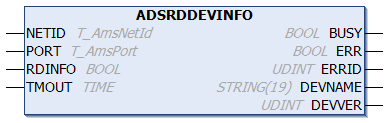
The function block reads the general device information.
 Inputs
Inputs
VAR_INPUT
NETID : T_AmsNetId;
PORT : T_AmsPort;
RDINFO : BOOL;
TMOUT : TIME := DEFAULT_ADS_TIMEOUT;
END_VARName | Type | Description |
|---|---|---|
NETID | T_AmsNetId | String containing the AMS network ID of the target device to which the ADS command is addressed (type: T_AmsNetId). |
PORT | T_AmsPort | Port number of the ADS device (type: T_AmsPort). |
RDINFO | BOOL | The ADS command is triggered by a rising edge at this input. |
TMOUT | TIME | Indicates the time before the function is canceled. |
 Outputs
Outputs
VAR_OUTPUT
BUSY : BOOL;
ERR : BOOL;
ERRID : UDINT;
DEVNAME : STRING(19);
DEVVER : UDINT;
END_VARName | Type | Description |
|---|---|---|
BUSY | BOOL | This output remains TRUE until the function block has executed a command, but at the longest for the duration supplied to the Timeout input. While BUSY = TRUE, no new command will be accepted at the inputs. Note that it is not the execution of the service but its acceptance whose time is monitored. |
ERR | BOOL | This output is switched to TRUE as soon as an error occurs during the execution of a command. The command-specific error code is contained in ERRID. If the function block has a timeout error, ERR is TRUE and ERRID is 1861 (hexadecimal 0x745). Is reset to FALSE by the execution of a command at the inputs. |
ERRID | UDINT | ADS error code or command-specific error code of the last executed command. Is reset to 0 by the execution of a command at the inputs. |
DEV | STRING | Name of the ADS device |
DEVVER | UDINT | Version number of the ADS device |
Example of calling the block in FBD:
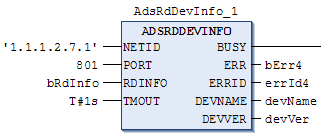
In the example, the device information of the first PLC run-time system (port 801) on computer 1.1.1.2.7.1 is read. As a result the name “PLC Server” and the version number 02.00.7 are received.
Prerequisites
Development Environment | Target platform | PLC libraries to be integrated (category group) |
|---|---|---|
TwinCAT v3.1.0 | PC or CX (x86, x64, Arm®) | Tc2_System (system) |