FB_EcGetSlaveState
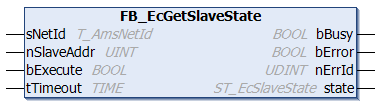
The function block FB_EcGetSlaveState allows the EtherCAT status and the Link status of an individual EtherCAT slave to be read. If the call is successful, the output variable state, whose type is ST_EcSlaveState, contains the requested status information.
 Inputs
Inputs
VAR_INPUT
sNetId : T_AmsNetId;
nSlaveAddr : UINT;
bExecute : BOOL;
tTimeout : TIME := DEFAULT_ADS_TIMEOUT;
END_VARName | Type | Description |
|---|---|---|
sNetId | String containing the AMS network ID of the EtherCAT master device. | |
nSlaveAddr | UINT | Fixed address of the EtherCAT slave whose state is to be read. |
bExecute | BOOL | The function block is enabled by a positive edge at this input. |
tTimeout | TIME | Maximum time allowed for the execution of the function block. |
 Outputs
Outputs
VAR_OUTPUT
bBusy : BOOL;
bError : BOOL;
nErrId : UDINT;
state : ST_EcSlaveState;
END_VARName | Type | Description |
|---|---|---|
bBusy | BOOL | This output is set when the function block is activated, and remains set until a feedback is received. |
bError | BOOL | This output is set after the bBusy output has been reset when an error occurs in the transmission of the command. |
nErrId | UDINT | Supplies the ADS error code associated with the most recently executed command if the bError output is set. |
state | ST_EcSlaveState | Structure that contains the EtherCAT status and the Link status of the slave. (Type: ST_EcSlaveState) |
Example of an implementation in ST:
PROGRAM TEST_GetSlaveState
VAR
fbGetSlaveState : FB_EcGetSlaveState;
sNetId : T_AmsNetId := '172.16.2.131.2.1';
bExecute : BOOL;
state : ST_EcSlaveState;
nSlaveAddr : UINT := 1001;
bError : BOOL;
nErrId : UDINT;
END_VAR
fbGetSlaveState(sNetId:= sNetId, nSlaveAddr:= nSlaveAddr, bExecute:=bExecute);
state := fbGetSlaveState.state;
bError := fbGetSlaveState.bError;
nErrId := fbGetSlaveState.nErrId;Prerequisites
Development environment | Target platform | PLC libraries to include |
|---|---|---|
TwinCAT v3.1.0 | PC or CX (x86, x64, Arm®) | Tc2_EtherCAT |