FB_EcPhysicalReadCmd
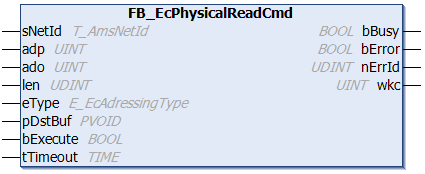
The function block FB_EcPhysicalReadCmd can be used to send an EtherCAT read command (FPRD, APRD, BRD) to a particular EtherCAT slave or to all EtherCAT slaves. This command can be used by the PLC to read a register or the DPRAM of the EtherCAT slave controller.
 Inputs
Inputs
VAR_INPUT
sNetId : T_AmsNetId;
adp : UINT;
ado : UINT;
len : UDINT;
eType : E_EcAdressingType := eAdressingType_Fixed;
pDstBuf : PVOID;
bExecute : BOOL;
tTimeout : TIME := DEFAULT_ADS_TIMEOUT;
END_VARName | Type | Description |
|---|---|---|
sNetId | String containing the AMS network ID of the EtherCAT master device. | |
adp | UINT | This value determines which EtherCAT slave is to be addressed with this command. The meaning of this value depends on the addressing mode selected with eType. (See adp value) |
ado | UINT | Physical memory (DPRAM) or register to be read. |
len | UDINT | Number of bytes to be read. |
eType | Different EtherCAT commands are sent, depending on value of eType. | |
pDstBuf | PVOID | The address (pointer) of the receive buffer. |
bExecute | BOOL | The function block is enabled by a positive edge at this input. |
tTimeout | TIME | Maximum time allowed for the execution of the function block. |
adp value
This value determines which EtherCAT slave is to be addressed with this command. The meaning of this value depends on the addressing mode selected with eType:
eType | Description |
|---|---|
eAdressingType_Fixed | The slave is addressed by means of its configured EtherCAT address. These EtherCAT addresses can be read via the function block FB_EcGetAllSlaveAddr. |
eAdressingType_AutoInc | The slave is addressed based on its position in the ring. The first device has the address 0 (adp=0); adp is decremented by one for all subsequent slaves: |
eAdressingType_BroadCAST | All slaves are addressed by this command. adp can be set to 0. |
eType
Different EtherCAT commands are sent, depending on value of eType:
eType | Command |
|---|---|
eAdressingType_Fixed | Configured Address Physical Read ( FPRD) |
eAdressingType_AutoInc | Auto Increment Physical Read ( APRD) |
eAdressingType_BroadCAST | Broadcast Read ( BRD) |
The individual commands differ in terms of addressing mode (see adp).
 Outputs
Outputs
VAR_OUTPUT
bBusy : BOOL;
bError : BOOL;
nErrId : UDINT;
wkc : UINT;
END_VARName | Type | Description |
|---|---|---|
bBusy | BOOL | This output is set when the function block is activated, and remains set until a feedback is received. |
bError | BOOL | This output is set after the bBusy output has been reset when an error occurs in the transmission of the command. |
nErrId | UDINT | Supplies the ADS error code associated with the most recently executed command if the bError output is set. |
wkc | UINT | The working counter is incremented by each EtherCAT slave that has processed this command successfully. If only one EtherCAT slave was addressed by this command, this value should therefore be 1. |
Example of an implementation in ST:
PROGRAM TEST_PhysicalReadCmd
VAR
fbReadCmd : FB_EcPhysicalReadCmd;
bExecute : BOOL;
value : UINT;
adp : UINT:=16#3E9;
ado : UINT:=16#1100;
eType : E_EcAdressingType := eAdressingType_Fixed;
sNetId : T_AmsNetId:='192.168.1.5.3.1';
wkc : UINT;
bError : BOOL;
nErrId : UDINT;
END_VAR
fbReadCmd (sNetId:=sNetID, ado:=ado, adp:=adp, eType:=eType, LEN := SIZEOF(value), pDstBuf:=ADR(value), bExecute:=bExecute);
wkc := fbReadCmd.wkc;
bError:= fbReadCmd.bError;
nErrId:= fbReadCmd.nErrId;Prerequisites
Development environment | Target platform | PLC libraries to include |
|---|---|---|
TwinCAT v3.1.0 | PC or CX (x86, x64, Arm®) | Tc2_EtherCAT |