FB_EcCoeSdoWriteEx
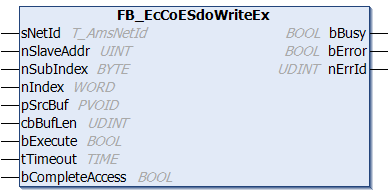
The FB_EcCoeSdoWriteEx function block permits an object from the object directory of an EtherCAT slave to be written by means of an SDO download. This requires the slave to have a mailbox and to support the “CANopen over EtherCAT” (CoE) protocol. The nSubIndex and nIndex parameters allow the object that is to be written to be selected. Via bCompleteAccess := TRUE the parameter can be written with sub-elements.
 Inputs
Inputs
VAR_INPUT
sNetId : T_AmsNetId; (* AmsNetId of the EtherCAT master device.*)
nSlaveAddr : UINT; (* Address of the slave device.*)
nSubIndex : BYTE; (* CANopen Sdo subindex.*)
nIndex : WORD; (* CANopen Sdo index.*)
pSrcBuf : PVOID; (* Contains the address of the buffer containing the data to be send. *)
cbBufLen : UDINT; (* Contains the max. number of bytes to be received. *)
bExecute : BOOL; (* Function block execution is triggered by a rising edge at this input.*)
tTimeout : TIME := DEFAULT_ADS_TIMEOUT;(* States the time before the function is cancelled. *)
bCompleteAccess : BOOL; (* access complete object*)
END_VARName | Type | Description |
|---|---|---|
sNetId | String containing the AMS network ID of the EtherCAT master device. | |
nSlave | UINT | Fixed address of the EtherCAT slave to which the SDO download command should be sent. |
nSubIndex | BYTE | Subindex of the object that is supposed to be written. |
nIndex | WORD | Index of the object that is supposed to be written. |
pSrcBuf | PVOID | Address (pointer) to the transmit buffer |
cbBufLen | UDINT | Amount of data to be sent in bytes |
bExecute | BOOL | The function block is enabled by a positive edge at this input. |
tTimeout | TIME | Maximum time allowed for the execution of the function block. |
bCompleteAccess | BOOL | If bCompleteAccess is set, the whole parameter can be written in a single access. |
 Outputs
Outputs
VAR_OUTPUT
bBusy : BOOL;
bError : BOOL;
nErrId : UDINT;
END_VARName | Type | Description |
|---|---|---|
bBusy | BOOL | This output is set when the function block is activated, and remains set until a feedback is received. |
bError | BOOL | This output is set after the bBusy output has been reset when an error occurs in the transmission of the command. |
nErrId | UDINT | Supplies the ADS error code associated with the most recently executed command if the bError output is set. |
Prerequisites
Development environment | Target platform | PLC libraries to include |
|---|---|---|
TwinCAT v3.1.0 | PC or CX (x86, x64, Arm®) | Tc2_EtherCAT |