H-Bot
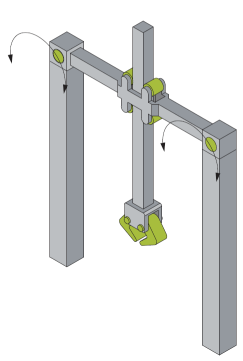
The H-Bot is built up as shown in the schema above.
The motor axes have to be scaled in mm representing the cable length at each side of the TCP. To calculate the transformation the relative cable movements are sufficient and no absolute cable lengths are needed.
The origin of the machine coordinate system is defined by the point where the position of both motors is zero.
Parameter for kinematics
|
Parameter |
Description |
Unit |
|---|---|---|
|
MCS2WCS OID |
Object ID of a static transformation which defines the position of MCS in base coordinate system (normally WCS). |
|
Parameter for dynamic model
|
Parameter |
Description |
Unit |
|---|---|---|
|
FirstDriveTorqueOID |
Object ID of the first drive torque |
|
|
SecondDriveTorqueOID |
Object ID of the second drive torque |
|
|
GravityOrientationOID |
Object ID of a static transformation that describes the mounting orientation. This parameter is used if the gripper does not show to the ground. The static transformation’s Z-axis defines the gravity orientation. If the robot is mounted as shown in the picture this OID can be zero. |
|