MC_Phasing
The MC_Phasing is used to achieve an offset of the slave axis with respect to the master axis. To this end, a phase offset of the master axis is specified from the point of view of the master axis and the slave axis tries to eliminate this offset by accelerating or decelerating. The motion is always executed jerk-limited with the constant set input "Jerk". This value is valid for both "Acceleration" and "Deceleration".
The mechanical analogy is releasing coupling of the master and slave axes for a limited period.
In the case of camming, this command results in a change in the "apparent" master position from the slave's point of view. In the case of gearing, a phase offset is produced between the master and slave by commanding a superimposed motion in the slave. Therefore, in the case of gearing, MC_Phasing has the same effect as MC_MoveSuperImposed (into which it is converted in the control system).
In the case of camming, the dynamics values "Velocity", "Acceleration" and "Deceleration" refer to the change in the "apparent" master position from the point of view of the slave whereas, in the case of gearing, they refer to the superimposed motion of the slave axis itself.
NC command:
<axis_name>[ MC_PhasingMaster=<expr> PhaseShift=<expr> Velocity=<expr>
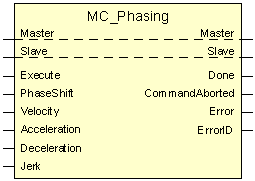
Acceleration=<expr> Deceleration=<expr> Jerk=<expr>]Block diagram in PLCopen:
Input pin | Unit |
|
Master | Logical axis number of the master axis | |
PhaseShift | [0,1µm or 10-4 °] | |
Velocity | [1µm/s or 10-3 °/s] | |
Acceleration | [1mm/s2 or 1°/s2] | |
Deceleration | [1mm/s2 or 1°/s2] | |
Jerk | [1m/s3 or 1000°/s3] |
Programming example
S[MC_Phasing Master=11 PhaseShift=25 Velocity=1000 Acceleration=500
Deceleration=600 Jerk=200]