MC_GearIn
The MC_GearIn commands gear coupling with a gear ratio. The gear ratio defines the speed ratio between the master and slave axes. The synchronization to the velocity is jerk-limited. "Jerk" is set in the NC command.
The slave axis can be coupled either to master setpoints or to actual master values. The selection is made in the "Mode" parameter.
NC command:
<axis_name>[ MC_GearInMaster=<expr> RatioNumerator=<expr> RatioDenominator=<expr>
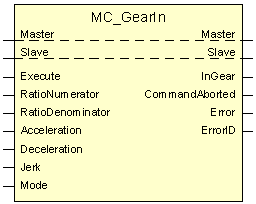
Acceleration=<expr> Deceleration=<expr> Jerk=<expr> Mode=<expr>]Block diagram in PLCopen:
Input pin | Unit |
| |
Master | Logical axis number of the master axis | ||
RatioNumerator | Gear ratio numerator | ||
RatioDenominator | Gear ratio denominator | ||
Acceleration | [1mm/s2 or 1°/s2] | ||
Deceleration | [1mm/s2 or 1°/s2] | ||
Jerk | [1m/s3 or 1000°/s3] | ||
Mode | 0 | Type of coupling between master axis and slave: Coupling based on command values. Automatic phase compensation: off. | |
128 | Type of coupling between master axis and slave: Coupling based on actual values. | ||
256 | Automatic phase compensation: on. Only for testing purposes! | ||
Programming example
S[MC_GearIn Master=11 RatioNumerator=2 RatioDenominator=3
Acceleration=500 Deceleration=600 Jerk=200 Mode=11]