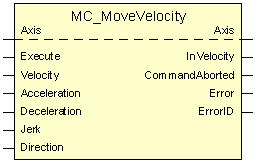
MC_MoveVelocity
With MC_MoveVelocity, you command an endless motion at the specified speed. The motion is always executed jerk-limited with the constant set input "jerk". This value is valid for both "acceleration" and "deceleration".
To stop the motion, the command must be interrupted by another command that sends a new command to the axis.
In conjunction with an MC_MoveSuperImposed the output "in_velocity" remains TRUE.
NC command:
<axis_name>[ MC_MoveVelocityVelocity=<expr> Acceleration=<expr> Deceleration=<expr>
Jerk=<expr> Direction=<expr>]Block diagram in PLCopen:
Input pin | Unit |
|
Velocity | [1µm/s or 10-3 °/s] | |
Acceleration | [1mm/s2 or 1°/s2] | |
Deceleration | [1mm/s2 or 1°/s2] | |
Jerk | [1m/s3 or 1000°/s3] | |
Direction | 1 positive direction 3 negative direction 4 current direction |
Programming example
S[MC_MoveVelocity Velocity=1333 Acceleration=770 Deceleration=880
Jerk=99 Direction=1]