Interim point contouring (Type 5)
Here the user specifies not only the corner distances but also an interim point PZ at which the two polynomial curves border each other (Expert mode). With this process it is possible to retain the programmed contour and fully utilize the dynamics by specifying the corner distance with zero. This means the corner distances here really must not be symmetrical.
The parametering is done with the following statement:
#CONTOUR MODE [ POS [PRE_DIST<expr>] [POST_DIST<expr>]
[<1.Hauptachsname><expr>] [<2.Hauptachsname><expr>]
[<3.Hauptachsname><expr>] [<action>] [CHECK_JERK<expr>]
[CONST_VEL<expr>]]POS Interim point contouring
PRE_DIST<expr> Distance to the corner in mm. Deviation point from the original contour.
Default value: 1 mm
POST_DIST<expr>Distance behind the corner in mm. Return point on the original contour.
Default value: 1 mm
<1.st_main_ax_name><expr> Position of the interim point in mm for the first main axis
<2.nd_main_ax_name><expr> Position of the interim point in mm for the second main axis
<3.rd_main_ax_name><expr> Position of the interim point in mm for the third main axis
<action> Time of execution for additional actions:
Valid key words | Significance |
|---|---|
PRE_ACTION | Execution before the contour curve. |
INTER_ACTION | Execution during the contour curve (default). |
POST_ACTION | Execution after the contour curve. |
CHECK_JERK<expr> Monitoring of jerk, caused by curvature of the polynomic (see [1]-41).
Value | Significance |
|---|---|
0 | Without jerk monitoring (default). |
1 | Jerk monitoring based on the geometric ramp time [2]-16. Possibly the path velocity is reduced. |
2 | Jerk monitoring based on the ramp times[2]- 21..24 of the non-linear velocity profile. |
CONST_VEL<expr> Constant path velocity in the contouring area.
Programming example
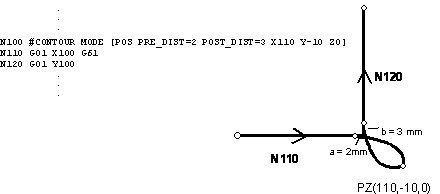 Fig.44: Interim point contouring (Type 5)
Fig.44: Interim point contouring (Type 5)