Corner deviation contouring (Type 4)
 | The default settings of contouring type 4 also are the default settings of polynomial contouring after program start! |
The corner distances, by which the bordering traverse blocks are shortened, are automatically determined upon geometrical considerations in such a manner that a corner deviation specified by the user is not exceeded. The corner distances are limited to half the block length at a time, but both distances are limited symmetrical. In contrast to the type 1 the programmed velocity has no influence of the polynomic contour.
The parametering occurs with the following statement:
#CONTOUR MODE [ DEV [PATH_DEV<expr>] [RELEVANT_PATH<expr>]
[RELEVANT_TRACK<expr>] [TRACK_DEV<expr>] [REMAIN_PART<expr>]
[<action>] [CHECK_JERK<expr>] [MAX_ANGLE<expr>] [CONST_VEL<expr>]]DEV Corner deviation contouring
PATH_DEV<expr> Maximum deviation from programmed contour in mm
Default value: 1 mm
RELEVANT_PATH<expr> Minimum path length of relevant post-blocks in mm
Default value: 0 mm
RELEVANT_TRACK<expr> Minimum path length of tracking axis for relevant post blocks in mm
Default value: 0 mm
TRACK_DEV<expr> Maximum deviation of the coupled axes in mm
Default value: 0 mm
REMAIN_PART<expr> Remaining part in percent [0; 100] of the original block
Default value: 0 %
<action> Time of execution for additional actions:
Valid key words | Significance |
|---|---|
PRE_ACTION | Execution before the contour curve. |
INTER_ACTION | Execution during the contour curve (default). |
POST_ACTION | Execution after the contour curve. |
CHECK_JERK<expr> Monitoring of jerk, caused by the curvature of the polynomic (see [1]-41).
Value | Significance |
|---|---|
0 | Without jerk monitoring (default). |
1 | Jerk monitoring based on the geometric ramp time [2]-16. Possibly the path velocity is reduced. |
2 | Jerk monitoring based on the ramp times[2]- 21..24 of the non-linear velocity profile. |
MAX_ANGLE<expr> Maximum contour angle for transitions between two linear blocks in degrees, up to it contouring is active. The contour angle is not considered, if one of the transition blocks is a circular block.
Default value: 0° (this means, all path elements are contoured)
CONST_VEL<expr> Constant path velocity in the contouring area.
Programming example
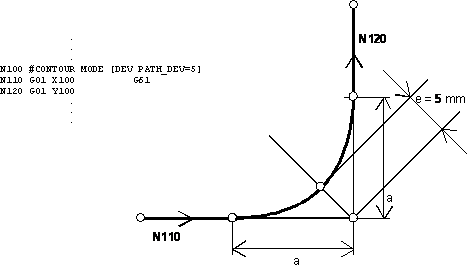 Fig.43: Corner deviation contouring (Type 4)
Fig.43: Corner deviation contouring (Type 4)