Automatic contouring with given velocity (Type 2)
In this type of contouring, the contour curve is dimensioned in a manner, that the curve can be traversed with the specified percentage value vb_proz of the programmed velocity of the pre-block. If for example, vb_proz = 50%, the contour curve is traversed with half the velocity programmed in the pre-block.
Because of the curvature of the contour and the given maximum acceleration of the axis nevertheless it is possible, that the desired velocity is not reached.
The parameterizing is done with the following statement:
#CONTOUR MODE [ AUTO_VEL [VEL<expr>] [RELEVANT_PATH<expr>]
[RELEVANT_TRACK<expr>] [TRACK_DEV<expr>] [REMAIN_PART<expr>]
[<action>] [CHECK_JERK<expr>] [MAX_ANGLE<expr>] [CONST_VEL<expr>]]AUTO_VEL Automatic contouring with given velocity
VEL<expr> Percentage velocity [0; 100]
Default value: 100 %
RELEVANT_PATH<expr> Minimum path length of relevant post-blocks in mm
Default value: 0 mm
RELEVANT_TRACK<expr> Minimum path length of tracking axis for relevant post blocks in mm
Default value: 0 mm
TRACK_DEV<expr> Maximum deviation of the coupled axes in mm
Default value: 0 mm
REMAIN_PART<expr> Remaining part in percent [0; 100] of the original block
Default value: 0 %
<action> Time of execution for additional actions:
Valid key words | Significance |
|---|---|
PRE_ACTION | Execution before the contour curve. |
INTER_ACTION | Execution during the contour curve (default). |
POST_ACTION | Execution after the contour curve. |
CHECK_JERK<expr> Monitoring of jerk, caused by the curvature of the polynomic (see [1]-41).
Value | Significance |
|---|---|
0 | Without jerk monitoring (default). |
1 | Jerk monitoring based on the geometric ramp time [2]-16. Possibly the path velocity is reduced. |
2 | Jerk monitoring based on the ramp times[2]- 21..24 of the non-linear velocity profile. |
MAX_ANGLE<expr> Maximum contour angle for transitions between two linear blocks in degrees, up to it contouring is active. The contour angle is not considered, if one of the transition blocks is a circular block.
Default value: 0° (this means, all path elements are contoured)
CONST_VEL<expr> Constant path velocity in the contouring area.
Programming example
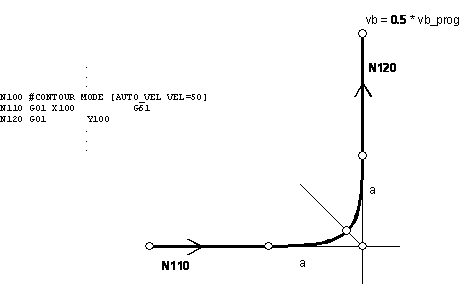 Fig.41: Automatic contouring (Type 2)
Fig.41: Automatic contouring (Type 2)