Simple helical interpolation
At the simplified helical programming no pitch, but only a target point is defined. Dependent on the target point the result is a helical movement with maximally one complete rotation.
Syntax example for plane G17:
G02 | G03X<expr>Y<expr>Z<expr>I<expr>J<expr> | R<expr>G02 | G03 Circular interpolation CW / CCW
X<expr> Y<expr> Target point in plane XY
Z<expr> Target point on the helical axis perpendicular to plane XY
I<expr> J <expr> Position of the circle center point of the interpolation in plane XY
(I in X, J in Y), corresponding to G161/G162.
R<expr> Radius of the circle to be interpolated (alternative to I,J)
Syntax corresponding to the selected interpolation plane:
Plane | Type of interpolation | Target point | Target point | Center /radius |
|---|---|---|---|---|
G17 | G02/G03 | X..Y.. | Z.. | I..J../R |
G18 | G02/G03 | Z..X.. | Y.. | K..I../R |
G19 | G02/G03 | Y..Z.. | X.. | J..K../R |
Example:
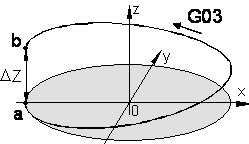
Helical interpolation counterclockwise in plane XY with following "helix":
Starting point a: X-10 Y0 Z0
Target point b: Z20
Helix center I, J: zero point
:
N10 G17 G90 X-10 Y0 Z0 F500 G161
N20 G03 I0 J0 Z20
: