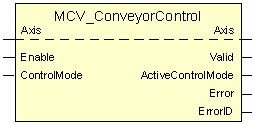
MCV_ConveyorControl
With the MCV_ConveyorControl function block the state of the dynamic behavior of an axis is sent to the motion controller. This is done for an axis that isn’t under control of the motion controller, because the axis is configured as encoder axis (see P-AXIS-00015).
This information influences the synchronization motion of an axes group that is synchronized with that encoder axis, because the encoder axis is configured as master axis of the axes group.
Block diagram
Parameters of the function block
VAR_IN_OUT | |||
| Axis | AXIS_REF | Axis reference |
VAR_INPUT | |||
| Enable | BOOL | TRUE, state of dynamic behavior is sent to the motion controller |
| ControlMode | UDINT | Actual dynamic behavior of the axis. Allowed values are: 0: HLI_CONVEYOR_SPEED_CONST 1: HLI_CONVEYOR_ACCELERATION 2: HLI_CONVEYOR_DECELERATION 3: HLI_CONVEYOR_SPEED_ZERO |
VAR_OUTPUT | |||
| Valid | BOOL | TRUE, value at output |
| ActiveControlMode | UDINT | Actual dynamic behavior of the encoder axis, which was delivered to the motion controller. |
| Error | BOOL | Indicates if an error has occurred. |
| ErrorID | WORD | Error identification. |
Behavior of the FB:
- This functionality isn’t available for all motion controller variants.
- To use this functionality with motion controllers containing it, you have to configure axis parameters of group conv_sync within axis parameter list ([AXIS]) and within channel parameter list ([CHAN]) parameters of the group conveyor_sync.