Dependencies on the type of referencing method
As already mentioned, different referencing methods are available. A method is selected by means of an input in the respective axis lists (achsmdsX.lis) via the ‘kenngr.homing.homing_type’ element. Here, the method is selected by means of a defined string. Refer to the following table for details of available methods:
Method | Key word |
|---|---|
Travel to fixed stop, NC-controlled | TORQ |
Compatibility mode | NONE |
Axis behavior in the case of the referencing type NONE
- If commanding has taken place, for the axis the value is accepted as the reference position that is stored in the ‘getriebe[i].pos_refpkt’ element in the axis list (achsmdsX.lis).
- The behavior of the axis during commanding depends on the defined drive type. If the drive type DSE (see kenngr.antr_typ) is defined for the axis, the axis will not move when the FB is commanded. The defined reference position is directly accepted and the ‘Done’ output is set to TRUE.
If the drive type Simulation (see kenngr.antr_typ) is defined for the axis, the axis will move and will assume the defined reference position after a short distance.
Axis behavior in the case of the referencing type TORQ
- If the drive type DSE is defined for the axis, the axis will move when the FB is commanded.
- When the TORQ referencing type is used, further parameters in the axis list (achsmdsX.lis) must be assigned values. There are general parameters that refer to the referencing operation as such. These feature the ‘kenngr.homing.’ prefix in the axis list.
Name | Dimension | Value range | Description |
|---|---|---|---|
torq_min_distance | 0,1 μm | < torq_max_distance | Minimum distance up to detection of the reference position |
torq_max_distance | 0,1 μm | 0 ... MAX_SGN23 | Maximum distance up to detection of the reference position |
torq_homing_dir |
| [POSITIVE | NEGATIVE] | Direction of reference point travel |
torq_detect_velocity_limit | 0,1 % | 0 ... 1000 | Speed limit for detection of the reference position |
torq_retraction_distance | 0,1 μm | MAX_SGN32 | Withdrawal distance after detection of the reference position |
torq_homing_position | 0,1 μm | MAX_SGN32 | Reference position |
torq_detect_time | μs | MAX_UNS32 | Minimum time that the limit torque must be exceeded for the reference position to be detected. |
General parameters for referencing to fixed stop
The gear speed-dependent parameters feature the ‘getriebe[X].homing.’ prefix. An ordinal number for the respective gear speed is entered for X.
Name | Dimension | Value range | Description |
|---|---|---|---|
torq_move_acceleration | mm/s2 | <= a_max | Acceleration |
torq_move_velocity | μm/s | <= vb_max | Speed for axis motion |
torq_move_torque_limit | 0,1 % | 0 ... 1000 | Percentage torque limit for motion |
torq_detect_torque_limit | 0,1 % | 0 ... 1000 | Limit for detection of the standing axis. Percentage value referred to torq_move_torque_limit. |
Gear speed-specific parameters for referencing to fixed stop
The following graphic shows in what way the parameters listed have an influence on travel to a fixed stop.
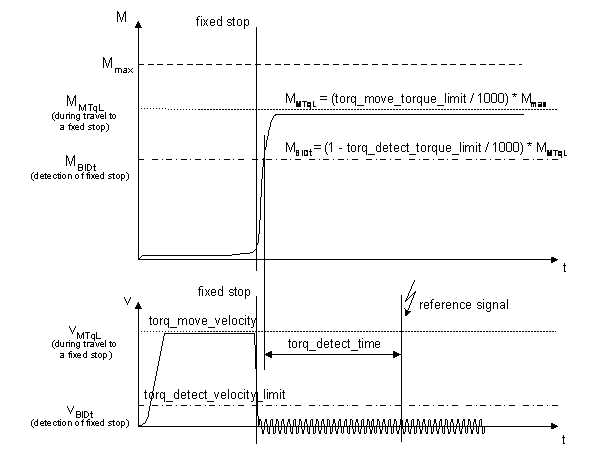 Fig.18: Influence during travel to a fixed stop
Fig.18: Influence during travel to a fixed stop