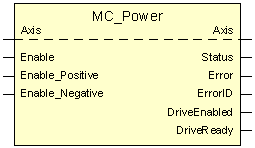
MC_Power
The MC_Power FB switches the power of the drive of the axis defined by AXIS_REF on or off. It is assigned to the group of administrative FBs.
Block diagram
Parameters of the FB
VAR_IN_OUT | |||
| Axis | AXIS_REF | Axis reference |
VAR_INPUT | |||
| Enable | BOOL | If ‘Enable’ is true, power is on. |
| Enable_Positive | BOOL | If ‘Enable’ is true, permits motion in positive direction only. This feature is currently not supported. |
| Enable_Negative | BOOL | If ‘Enable’ is true, permits motion in negative direction only. This feature is currently not supported. |
VAR_OUTPUT | |||
| Status | BOOL | Effective state of the power stage. |
| Error | BOOL | Indicates if an error has occurred. |
| ErrorID | WORD | Errror identification. |
| DriveEnabled | BOOL | TRUE indicates that the drive is ready for enabling power. |
| DriveReady | BOOL | TRUE indicates that the drive is being controlled. |
Behavior of the FB
- The power for the drive is connected only if all three inputs have the value TRUE.
- Regardless of the status of the axis, this FB can be commanded, and the command can be sent to the motion controller.
- If there is an error in other axes, the MC_Power FB reacts with an axis error (‘ErrorID’ = 40001 and ‘MC_ReadAxisError.ErrorID’ = 294039)
- The behavior of the axis depends on the defined drive type. If the drive type simulation (kenngr.antr_typ 4) is defined for the axis, the ‘status’ output is also simulated.
- If the drive type DSE (see kenngr.antr_typ) is defined for the axis and motors with an integrated brake are used, the FB also contains opening of the brakes.
The setting of the braking deceleration times when setting/removing the controller enabling signals by means of this FB are defined in the axis lists achsmds[X].lis by means of the following entries: - antr_digital.typ.dse.brake_open_delay_time
- antr_digital.typ.dse.brake_open_time
- antr_digital.typ.dse.brake_close_premature_time.
Refer to the following timing diagrams for the exact behavior:
Brake opening:
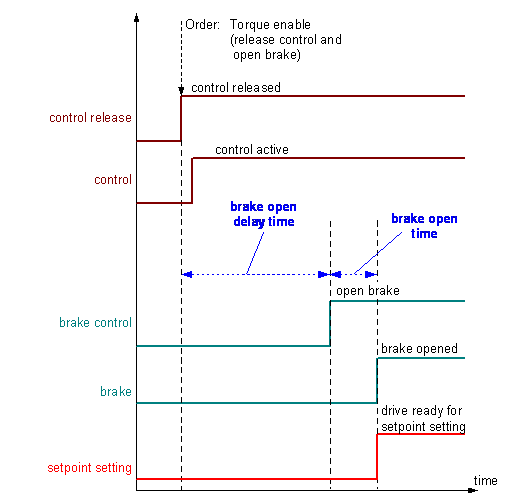 Fig.16: Timing when opening the brake
Fig.16: Timing when opening the brakeBrake closing:
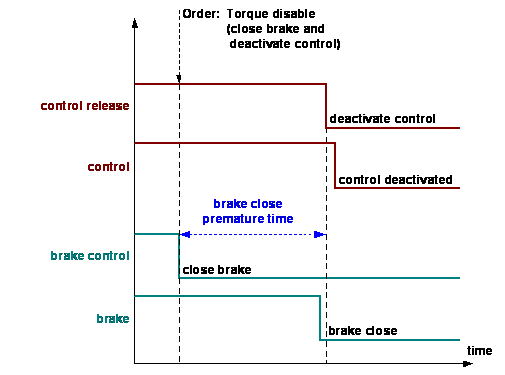 Fig.17: Timing when closing the brake
Fig.17: Timing when closing the brake