Calculating the polynomial coefficients and interpolation
The polynomials of the fifth order for determination of the slave position s as a function of the master position t in the ranges of non-constant speed are of the form

They are defined by six boundary conditions. At the start and end points, the position s and the first (speed v) and second derivations (acceleration a) must agree with the neighboring intervals. The second derivation, i.e. the "acceleration", should be equal to 0 on the left and right. Figure 20 shows three successive intervals with the aid of which the polynomial coefficients are calculated.
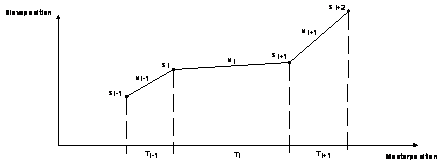
Master-Slave-Intervals of a cam table
Below, a cam table of the POLY5-LINE type is calculated as an example and is presented with the position, speed and acceleration in the individual intervals.
Tablename = poly5line_2 # Table name
Table-ID = 402 # Table id
Tabletype = 7 # Table type
Functiontype = 5 # Type of interpolation, 5 = POLY5-LINE
Lines = 10 # Number of lines
Begintable # Begin of table
100000 0
200000 400000
400000 1600000
670000 1800000
900000 300000
980000 1700000
1500000 3400000
1800000 2700000
2700000 1700000
3000000 2600000
EndTableIn the first diagram, the intervals with polynomials are shown in red and the intervals with constant speed are shown in blue.
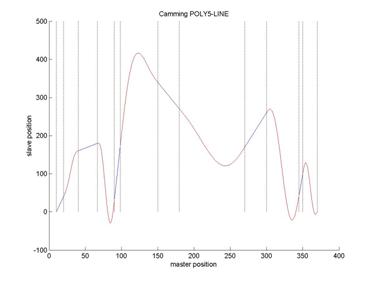
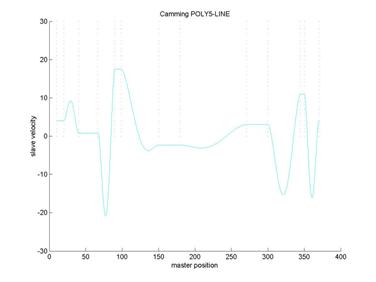
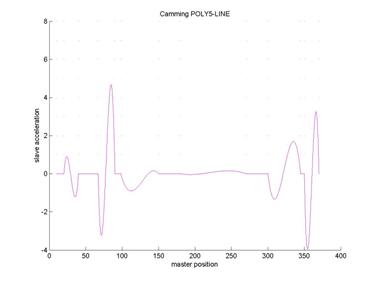 Fig.10: Example for cam with POLY5-LINE
Fig.10: Example for cam with POLY5-LINE