KIN_TYP_59
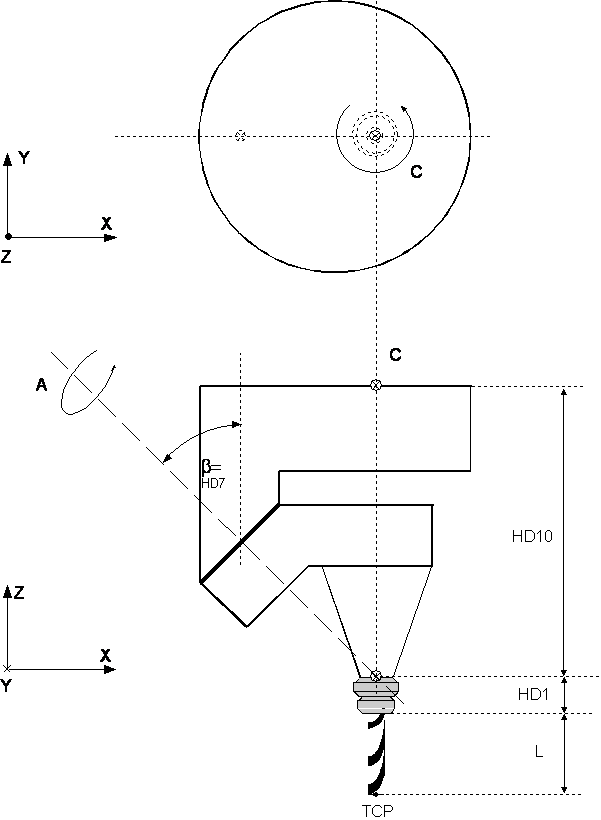
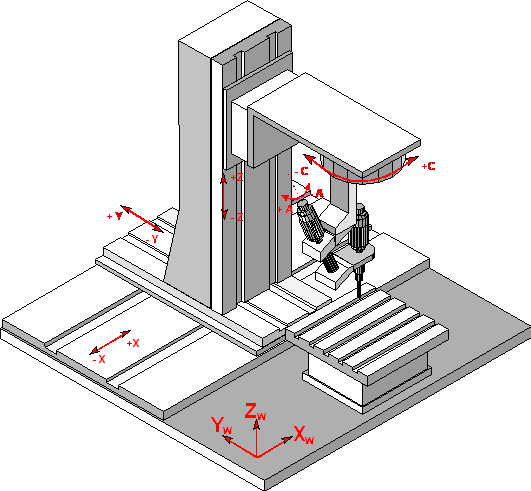
The kinematic structure of this machine consists of three translatory and two rotary axes in tool.The A axis is rotated arround the Y-axis with an angle != 90 degrees,. typical 30 up to 60 degrees.
Axis configuration in NC channel | ||
Axis designation | X, Y, Z, C A | |
Axis index | 0, 1, 2, 3, 4 | |
Kinematic structure | ||
| Tool axes | Workpiece axes |
NC axes | X,Y, Z, C, A | - |
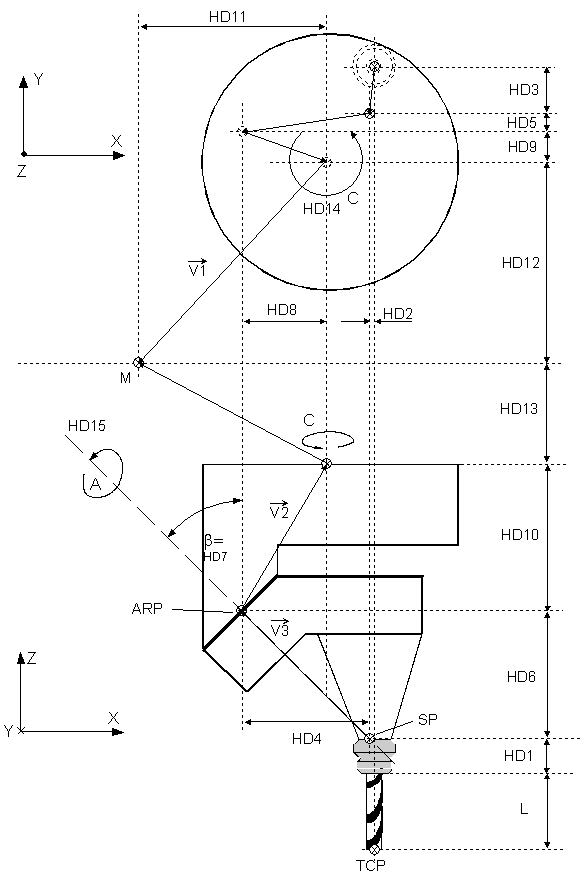
Offset data of kinematic:
HD-Offset | param[i] | Description |
|---|---|---|
HD1 | 0 | Z- Offset to tool fixpoint |
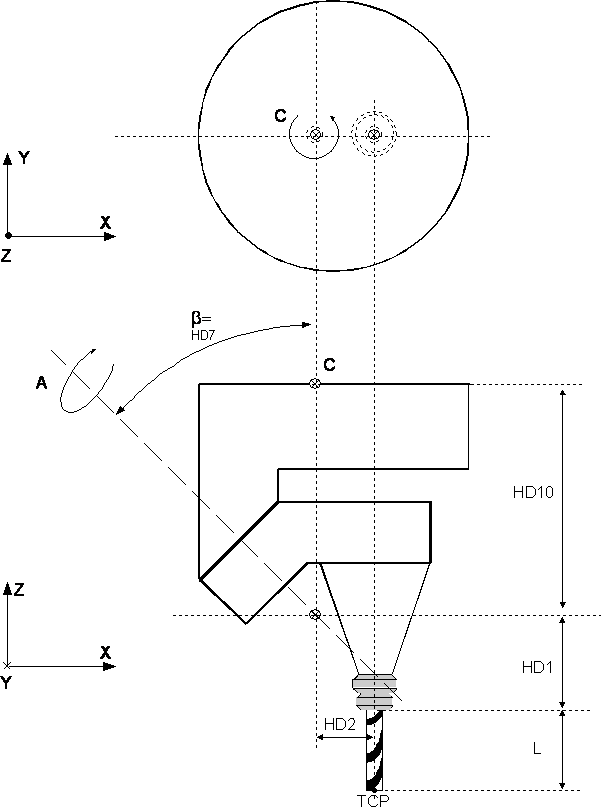
HD2 | 1 | X- Offset to tool fixpoint |
HD3 | 2 | Y- Offset to tool fixpoint |
HD4 | 3 | X- Offset from compensation point (SP) to A-axis |
HD5 | 4 | Y- Offset from compensation point (SP) to A-axis |
HD6 | 5 | Z- Offset from compensation point (SP) to A-axis |
HD7 | 6 | Angle between A-axis and Z-axis |
HD8 | 7 | X- Offset A-axis to C-axis |
HD9 | 8 | Y- Offset A-axis to C-axis |
HD10 | 9 | Z- Offset A-axis to C-axis |
HD11 | 10 | X- Offset from C-axis to machine point M |
HD12 | 11 | Y- Offset from C-axis to machine point M |
HD13 | 12 | Z- Offset from C-axis to machine point M |
HD14 | 13 | Rotary offset C-axis |
HD15 | 14 | Rotary Offset A-axis |
|
|
|
HD21 | 20 | Control flag: 0: Transformation of rotary axes C and A , default. 1: No transformation of rotary axes, C and A are machine angles. |
In general the reference point named ARP is located in reference point named SP, this means the vector V3 is 0 and the reference point SP is located in tool axis which has the same rotation axis than the C-axis. In this case only the parameters L, HD1, HD7 and HD10 are necessary.