Right handed, left handed
Offset data of kinematic:
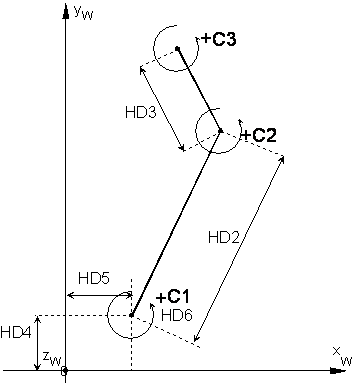
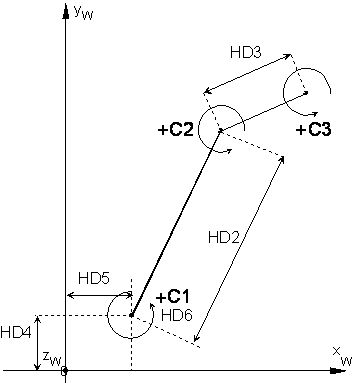
HD-offset | param[i] | Description |
|---|---|---|
HD1 | 0 | WZ length offset in z-direction |
HD2 | 1 | offset joint 1 to joint 2 |
HD3 | 2 | offset joint 2 to axis C3 |
HD4 | 3 | x-offset zero point C1 axis |
HD5 | 4 | y-offset zero point C1 axis |
HD6 | 5 | rotary offset C1 axis |