KIN_TYP_36
The robot kinematic consists of three rotatary and one translatory NC-axes in tool. In Z-axis direction tool length correction is done. All rotary axes are from type C axis.
Axis configuration in NC channel | ||
Axis designation | X, Y, Z, C (C1, C2, Z, C3) | |
Axis index | 0, 1, 2, 3 | |
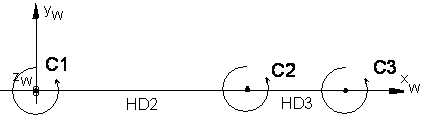
Kinematic structure | ||
| Tool axes | Workpiece axes |
NC axes | X,Y, Z, C | - |
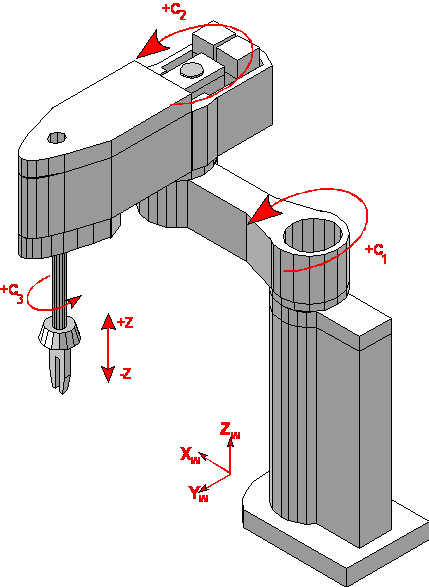
Depending on angular position of robot joint 2 (C2) the SCARA works as left or right handed robot.The machine axis position before activation of transformation determines if the robot moves as left or right handed SCARA. Change from left-handed robot to right handed robot can be done with inactive transformation.
Further Information