KIN_TYP_23
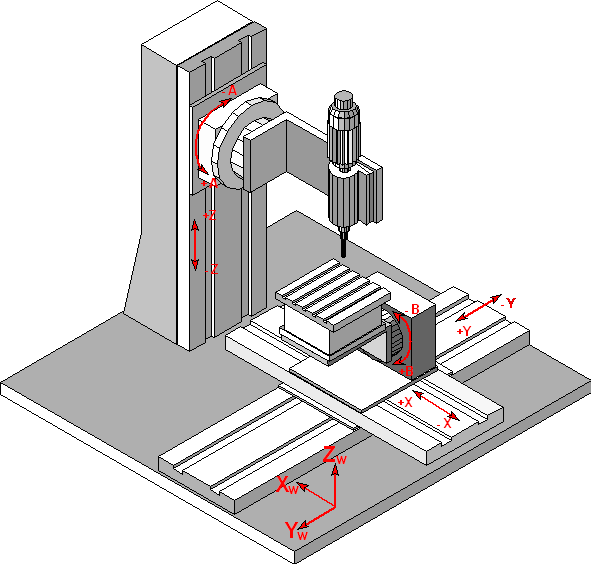
The kinematic structure of this machine consists of two translatory axes in workpiece, one translatory axis in the tool and one rotary axis in workpiece and the tool.
Axis configuration in NC channel | ||
Axis designation | X, Y, Z, A, B | |
Axis index | 0, 1, 2, 3, 4 | |
Kinematic structure | ||
| Tool axes | Workpiece axes |
NC axes | Z, A | X, Y, B |
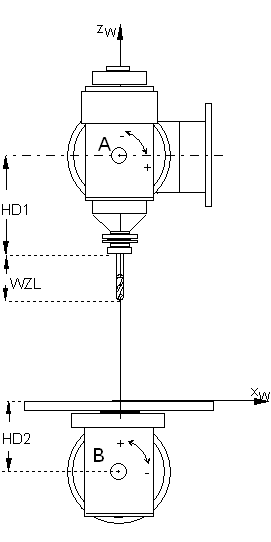
Offset data of kinematic:
HD-offset | param[i] | Description |
|---|---|---|
HD1 | 0 | Axis offset from tool holding device to rotation point of A Axis |
HD2 | 1 | Distance rotation point B axis to working piece platform |
HD4 | 3 | Rotation sign rotary axis A |
HD5 | 4 | Rotation sign rotary axis B |