KIN_TYP_17
The kinematic structure consists of three translatory NC axes. In addition, there are rotary axes which can manually be set. These axes cannot be addressed from the NC program.
Axis configuration in NC channel | ||
Axis designation | X, Y, Z | |
Axis index | 0, 1, 2 | |
Kinematic structure | ||
| Tool axes | Workpiece axes |
NC axes | X, Y, Z | - |
Auxiliary axes | C, A | - |
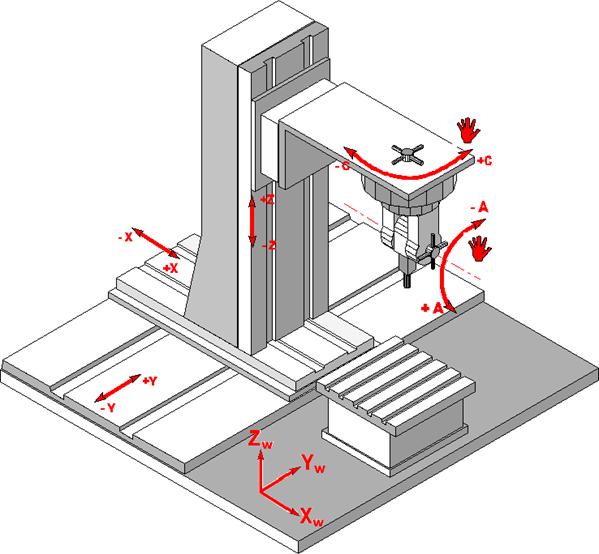
The axes are arranged in the sense of a right-handed system. The home position of the A axis is in the negative direction of the Z axis.
The automatic orientation setting of the tool head with manually adjustable C and A axis is not possible.
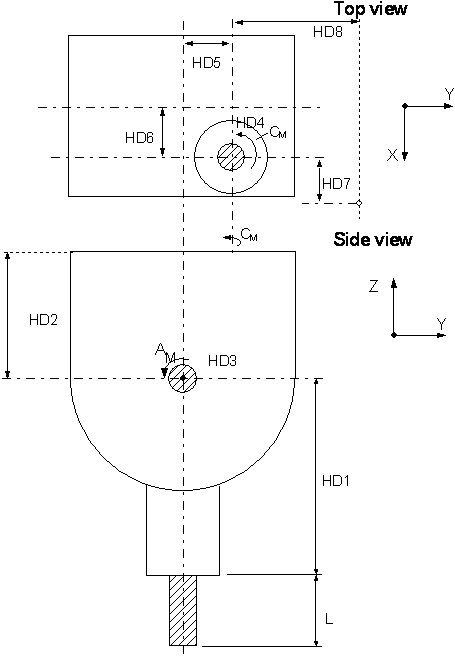
Offset data of the kinematic structure:
HD offset | param[i] | Description |
|---|---|---|
HD1 | 0 | Z Axis offset from tool holding device to rotation point of A axis (auxiliary) |
HD2 | 1 | Z axis offset of tool holding device to rotation point of C axis |
HD3 | 2 | Fixed angle for manual auxiliary A-axis |
HD4 | 3 | Fixed angle for manual auxiliary C-axis |
HD5 | 4 | Y offset rotation axis A to rotation axis C |
HD6 | 5 | X offset from to tool reference point rotation to rotation point of C axis |
HD7 | 6 | Static tool offset in X |
HD8 | 7 | Static tool offset in Y |