KIN_TYP_8
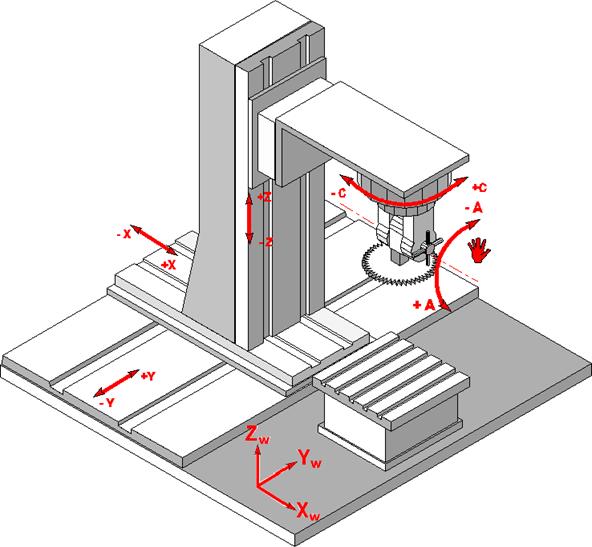
The kinematic structure consists of three translatory NC axes and one rotary NC axis in the tool. In addition, there is a fifth rotary axis that can manually be set. This fifth axis cannot be addressed from the NC program.
Axis configuration in NC channel | ||
Axis designation | X, Y, Z, C | |
Axis index | 0, 1, 2, 3 | |
Kinematic structure | ||
| Tool axes | Workpiece axes |
NC axes | X, Y, Z, C | - |
Auxiliary axes | A | - |
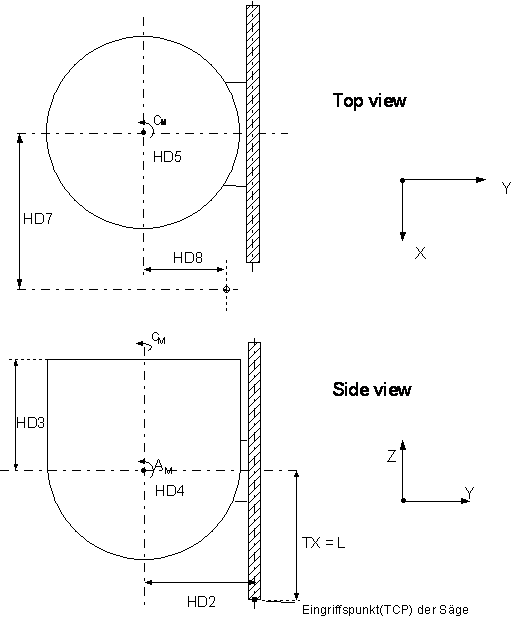
Offset data of the kinematic structure:
HD offset | param[i] | Description |
|---|---|---|
HD2 | 1 | Y Axis offset from tool holding device to rotation point of A Axis (auxiliary) |
HD3 | 2 | Z axis offset rotation point of A axis to tool reference point |
HD4 | 3 | Fixed angle for manual auxiliary A axis |
HD5 | 4 | Rotation offset of C axis |
HD7 | 6 | Static tool offset in X |
HD8 | 7 | Static tool offset in Y |