Transformation parameters (P-AXIS-00382)
Variable name | Type | Significance (depends on transformation ID) | Axis type | Dimension | |
|---|---|---|---|---|---|
param[i] | REAL64 | ID 1 | R | ---- | |
param[0] | h (*) | ||||
param[1] | k0 (*) | ||||
param[2] | k1 (*) | ||||
param[3] | k2 (*) | ||||
(*see equations of the functions) ID 2: | |||||
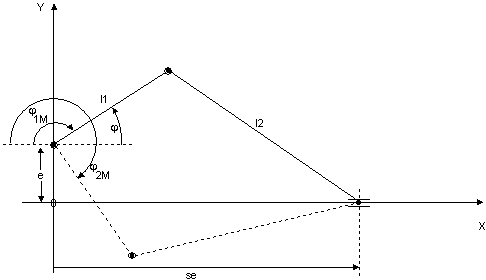
param[0] | Crank length l1 | ||||
param[1] | Con-rod length l2 | ||||
param[2] | Eccentricity e | ||||
param[3] | Solution range for motor angleϕM 0:.0..180 degree 1: 180..360 degree | ||||
param[4] | Moving direction of linear axis 0: positive 1: negative | ||||
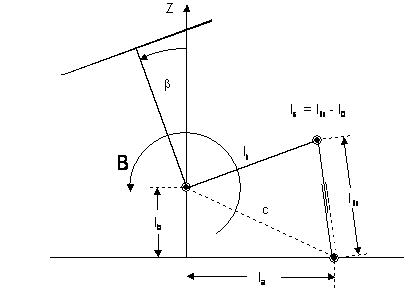
ID 4: | |||||
param[0] | la Distance 1 hinge points | ||||
param[1] | lb Distance 2 hinge points | ||||
param[2] | Crank length lh | ||||
param[3] | Offset zero position linear axis | ||||
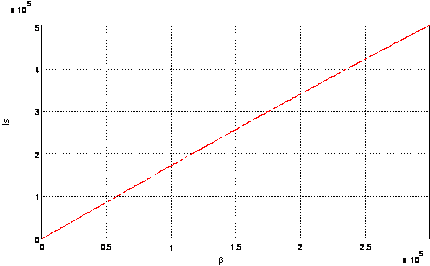
ID 1: e- function

Example:
trafo.command_pos.param[0] 10000
trafo.command_pos.param[1] 1.0
trafo.command_pos.param[2] 2.0
trafo.command_pos.param[3] 1.0 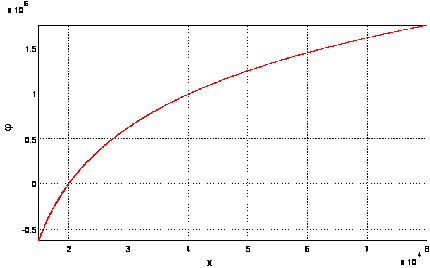
ID2: Crank

Example:
trafo.command_pos.param[0] 1000000
trafo.command_pos.param[1] 3000000
trafo.command_pos.param[2] 0
trafo.command_pos.param[3] 0 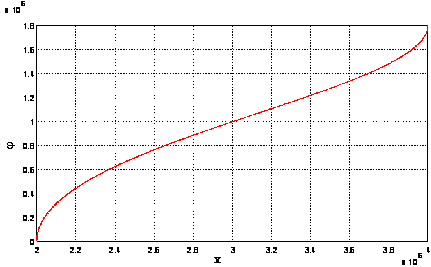
ID4: Crank with linkage by linear axis

Example:
trafo.command_pos.param[0] 1000000
trafo.command_pos.param[1] 1410000
trafo.command_pos.param[2] 1000000
trafo.command_pos.param[3] 0 If the kinematic is in zero position(β=0), the transformation delivers for ls the position 0. If necessary, by param[3] an offset to this position can be defined.