Factor for dynamic following error monitoring (P-AXIS-00167)
Standard following error monitoring
The factor "getriebe[i].slep_dyn" determines the time constant of an estimation filter for the dynamic following error monitoring in the position controler. This parameter must be determined empirically.
If the parameter is equal to "1024", then the following error monitoring is switched off.
Variable name | Type | Permissible range | Axis type | Dimension |
slep_dyn | SGN16 | 700<slep_dyn < 1024 | T, R | ---- |
Linear following error monitoring
The parameter defines the slope within the estimation of the dynamic following error using the following equation.
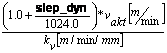
The following error monitoring is disabled if the parameter has the value "1024".
Variable name | Type | Permissible range | Axis type | Dimension |
slep_dyn | SGN16 | 0<slep_dyn<1024 | T, R | ---- |
Non linear following error monitoring
The parameter defines the time-constant of an "estimation-filter" within the dynamic following error monitoring.This parameter must be determined empirically.
The following error monitoring is disabled if the parameter has the value "1024".
Variable name | Type | Permissible range | Axis type | Dimension |
slep_dyn | SGN16 | 0<slep_dyn<1024 | T, R | ---- |