BAC_PID_03
Functional description
The template BAC_PID_03 is a universal PID controller.
The PID controller is enabled using the input variable bEn.
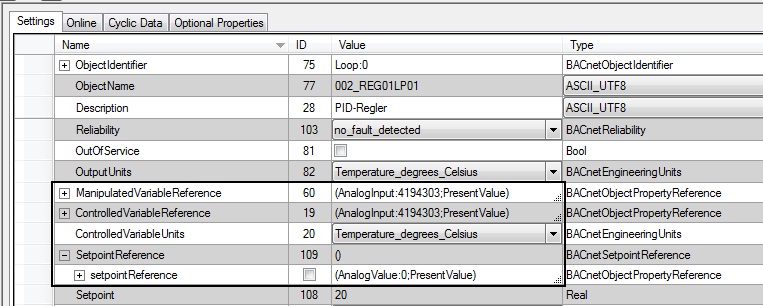
The LOOP object does not require any referencing objects for the setpoint, actual value and control output. For this the PLC comment syntax must be specified as follows:
(BACnet_ManipulatedVariableReference : undefined : )
(BACnet_ControlledVariableReference : undefined : )
(BACnet_SetpointReference : undefined : )
In the System Manager the undefined comments are converted as shown in the picture:
Interface
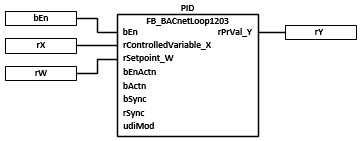
Block diagram
VAR_INPUT
bEn : BOOL;
rX : REAL;
rW : REAL;
bEn: enable
rX: actual value
rW: setpoint
VAR_OUTPUT
rY : REAL;
rY: control value output
Program description
Instance | Type | Task |
|---|---|---|
PID | FB_BACnetLoop1203 | PID controller |
Version history
Version number | Comments |
|---|---|
1.0.0.1 | First release |