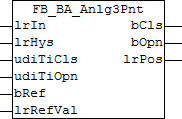
FB_BA_Anlg3Pnt
The function block is intended for control of three-point actuators for valves or dampers.
Functional description
The function block converts a constant control signal for positioning of the actuator into binary commands for opening and closing.
If the deviation between the set position value lrIn and the calculated actual position value lrPos of the actuator exceeds the threshold value set with the variable lrHys/2, the function block starts to correct the position by switching the outputs bOpn or bCls, depending on the magnitude of the control deviation:
| bOpn | bCls |
lrIn - lrPos > lrHys/2 | TRUE | FALSE |
lrIn - lrPos < - lrHys/2 | FALSE | TRUE |
The input lrIn is automatically limited to the range 0..100% internally.
A rising edge at bRef triggers a referencing command (the calculated actual position is set to lrRefVal).
If the drive has limit switches, they can be sampled directly via the digital input and used for referencing at bRef.
Inputs/outputs
VAR_INPUT
lrIn : LREAL;
lrHys : LREAL;
udiTiCls : UDINT;
udiTiOpn : UDINT;
bRef : BOOL;
lrRefVal : LREAL;
lrIn: setpoint for the actuator position [0…100 %]
lrHys: hysteresis for the actuator position [0…100 %]
udiTiCls: run time of the actuator from closed to open [ms]
udiTiOpn: run time of the actuator from closed to open [ms]
bRef: edge references the internal position memory of the drive to value of lrRefVal [0…100 %]
lrRefVal: value for referencing the actuator with bRef [0…100 %]
VAR_OUTPUT
bCls : BOOL;
bOpn : BOOL;
lrPos : LREAL;
bCls: output for closing the actuator
bOpn: output for opening the actuator
lrPos: current calculated actuator position [0…100 %]
Requirements
Development environment | Target system | required library | required supplement |
|---|---|---|---|
TwinCAT 2.11 R3/x64 | PC/CX | TcBA library from V1.0.0 | TS8040 | TwinCAT Building Automation from V1.0.0 |