State Machine Master Settings
State Machine Master Settings
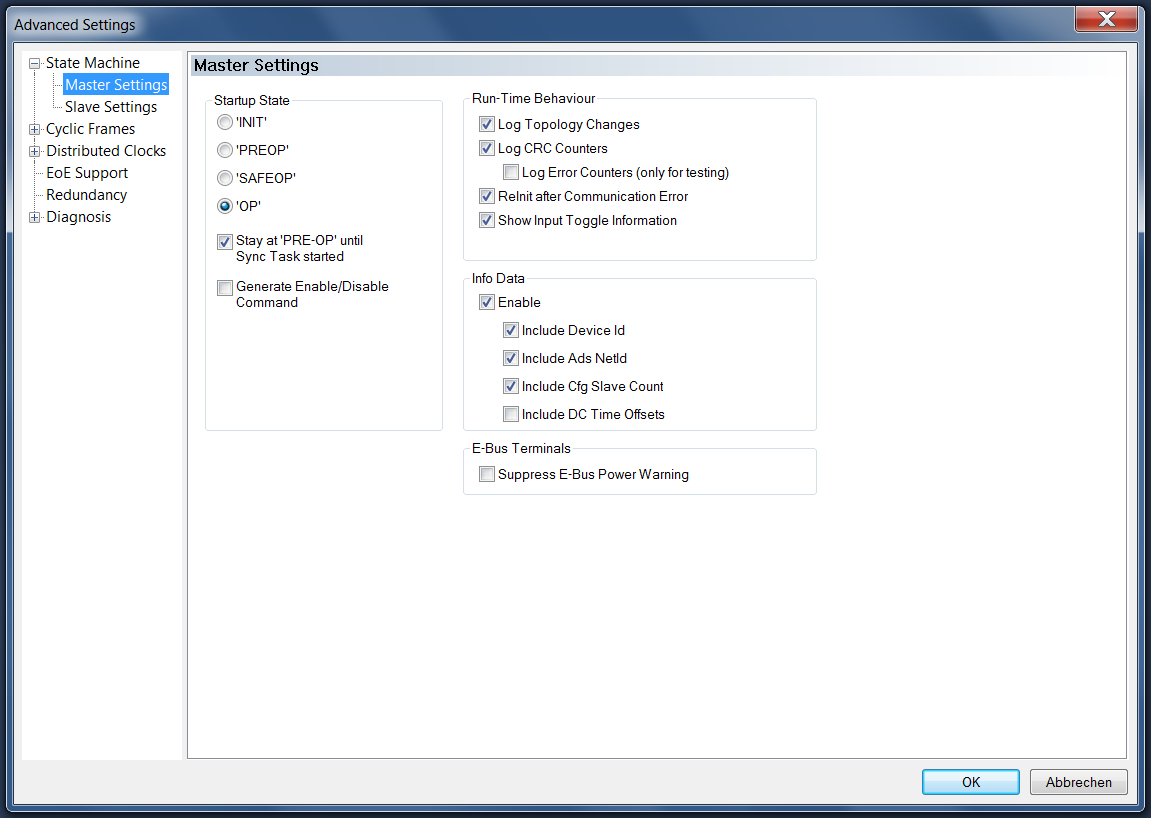
Startup State
After start-up, the EtherCAT master runs in the state selected in the radio button. If, for example, "OP" is selected, the EtherCAT master passes through all previous EtherCAT states before arriving in "OP" state. To remain in "INIT" state after start-up, select the "INIT" option.
Stay at 'PRE-OP' until Sync Task started
The EtherCAT master waits in "PRE-OP" state until the synchronizing task starts its frames.
Run-Time Behavior
Log Topology Changes: If this checkbox is checked, topology changes are logged.
Log CRC Counters: If this checkbox is checked, the counters for the cyclic redundancy check are logged.
ReInit after Communication Error: If this checkbox is checked, all slave devices are set to the "INIT" state at least temporarily after a communication error has occurred. If the EtherCAT master has left the "OP" state during the communication error, TwinCAT attempts to reset the master to the "OP" state; it also passes through the "INIT" state. If the state of the EtherCAT master is controlled from within the application, the checkbox must be disabled, otherwise the two mechanisms can interfere with each other. Both access the EtherCAT master via ADS.
Show Input Toggle Information: If this checkbox is checked, an additional toggle variable is displayed for input terminals, which can be linked. It changes its state, 0 or 1, whenever a new datagram is received.
Info Data
Enable: If this checkbox is checked, the "Info" process image under the EtherCAT device is added to the I/O tree. In addition, an "InfoData" entry is added to the EtherCAT device and to the connected EtherCAT slave devices. The "InfoData" entry contains input variables, which provide information about the EtherCAT device and which normally do not change very often. Variables mapped to the "Info" images are not updated cyclically, but only if the image has changed. The variable "ChangeCnt" shows how often the content of an image has changed.
Include Device Id: If this checkbox is checked, the input variable "DevId" is added to the "InfoData" entry. "DevId" is the device ID of the EtherCAT device.
Include Ads NetId: If this checkbox is checked, the input variable "„AmsNetId" is added to the "InfoData" entry. The "AmsNetId" is a parameter required for communication via ADS with the EtherCAT master device. The ADS port of the EtherCAT master device is always 0xFFFF (65535) and the ADS port of an EtherCAT slave device matches the fixed address (see EtherCAT Addr) of the slave device.
Include Cfg Slave Count: If this checkbox is checked, the "CfgSlaveCount" input variable is added to the "InfoData" entry. The "CfgSlaveCount" variable is of the "UINT" type and contains the number of configured EtherCAT slave devices.
Include DC Time Offsets: If this checkbox is checked, the input variables "DcToTcTimeOffset" and "DcToExtTimeOffset" are added to the "InfoData" entry. The variable "DcToTcTimeOffset" is of type "LINT" and contains the offset between the distributed clock time and the TwinCAT time in nanoseconds. The variable "DcToExtTimeOffset" is of type "LINT" and contains the offset between the distributed clock time and the external time in nanoseconds.
E-Bus Terminals
Suppress E-Bus Power Warning: By default, TwinCAT warns against exceeding the maximum current consumption of an EtherCAT coupler (e.g. EK1100). If this checkbox is checked, this warning is suppressed.