TwinCAT Task with Image
In contrast to a standard task (see chapter TwinCAT Task), the TwinCAT Task with Image also has its own process image.
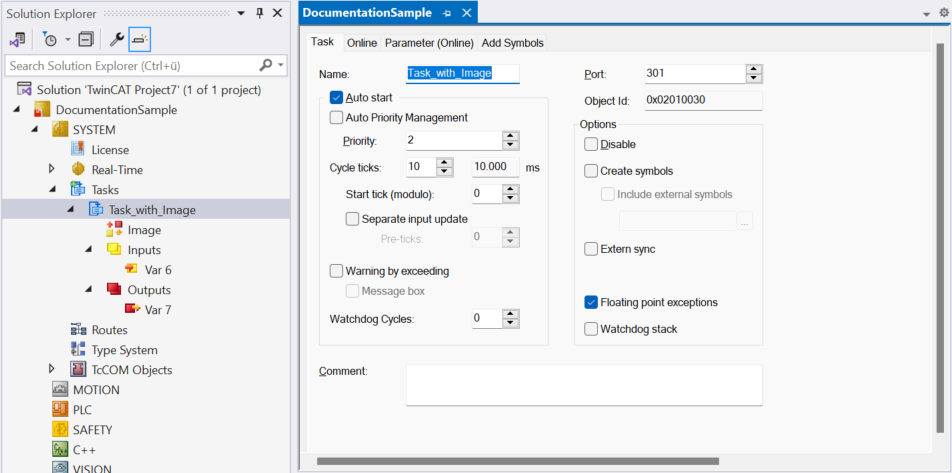
Variables can be created in this process image that are linked to other process images (e.g. from EtherCAT devices). Depending on the set cycle time and priority, the task triggers the mapping accordingly. It is therefore possible, for example, to operate cyclic bus communication without the need for a PLC or another runtime module. The variables of the process image can be accessed via ADS from the TwinCAT Scope or a non-real-time application, for example.