TwinCAT module properties
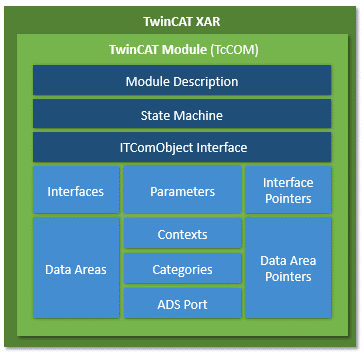
A TcCOM module has a number of formally defined, prescribed and optional properties. The properties are sufficiently formalized to enable interchangeable application. Each module has a module description, which describes the module properties. They are used for configuring the modules and their relationships with each other.
If a module is instantiated in the TwinCAT runtime, it registers itself with a central system instance, the ObjectServer. This makes it reachable and parameterizable for other modules and also for general tools. Modules can be compiled independently and can therefore also be developed, tested and updated independently. Modules can be very simple, e.g. they may only contain a basic function such as low-pass filter. Or they may be very complex internally and contain the whole control system for a machine subassembly.
There are a great many applications for modules; all tasks of an automation system can be specified in modules. Accordingly, no distinction is made between modules, which primarily represent the basic functions of an automation system, such as real-time tasks, fieldbus drivers or a PLC runtime system, and user- or application-specific algorithms for controlling a machine unit.
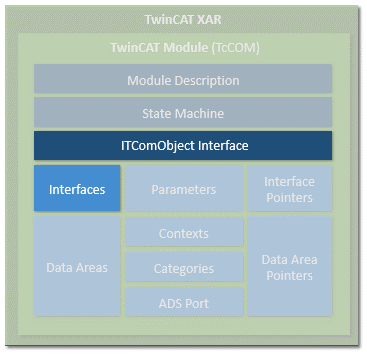
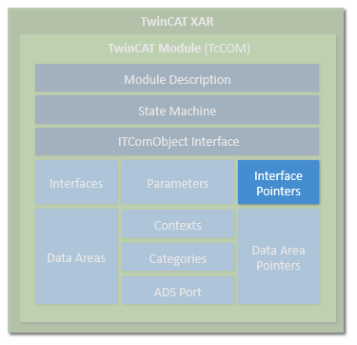
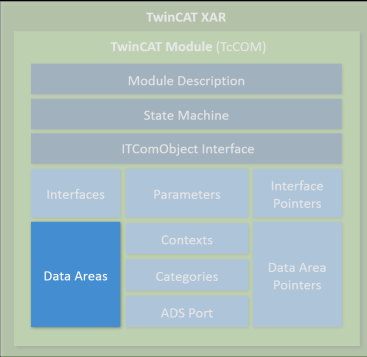
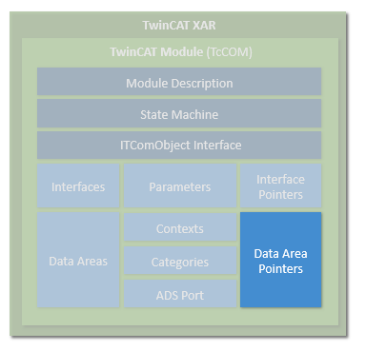
The diagram below shows a common TwinCAT module with his main properties. The dark blue blocks define prescribed properties, the light blue blocks optional properties.
Module description
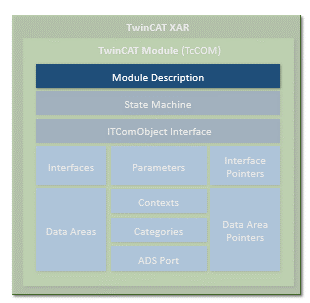
Each TcCOM module has some general description parameters. These include a ClassID, which unambiguously references the module class. It is instantiated by the corresponding ClassFactory. Each module instance has an ObjectID, which is unique in the TwinCAT runtime. In addition there is a parent ObjectID, which refers to a possible logical parent.
The description, state machine and parameters of the module described below can be reached via the ITComObject interface (see "Interfaces").
Class description files (*.tmc)
The module classes are described in class description files (TwinCAT Module Class; *.tmc).
These files are used by developers to describe the module properties and interfaces, so that others can use and embed the module. In addition to general information (vendor data, module class ID etc.), optional module properties are described.
- Supported categories
- Implemented interfaces
- Data areas with corresponding symbols
- Parameter
- Interface pointers
- Data pointers, which can be set
The system configurator uses the class description files mainly as a basis for the integration of a module instance in the configuration, for specifying the parameters and for configuring the links with other modules.
They also include the description of all data types in the modules, which are then adopted by the configurator in its general data type system. In this way, all interfaces of the TMC descriptions present in the system can be used by all modules.
More complex configurations involving several modules can also be described in the class description files, which are preconfigured and linked for a specific application. Accordingly, a module for a complex machine unit, which internally consists of a number of submodules, can be defined and preconfigured as an entity during the development phase.
Instance description files (*.tmi)
An instance of a certain module is described in the instance description file (TwinCAT Module Instance; *.tmi). The instance descriptions are based on a similar format, although in contrast to the class description files they already contain concrete specifications for the parameters, interface pointers etc. for the special module instance within a project.
The instance description files are created by TwinCAT Engineering (XAE), when an instance of a class description is created for a specific project. They are mainly used for the exchange of data between all tools involved in the configuration. However, the instance descriptions can also be used cross-project, for example if a specially parameterized module is to be used again in a new project.
State machine
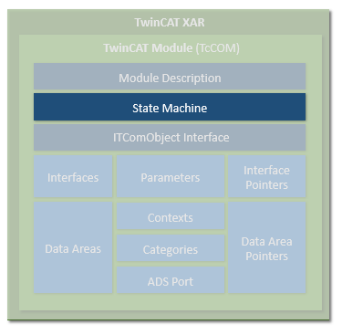
Each module contains a state machine, which describes the initialization state of the module and the means with which this state can be modified from outside. The state machine describes the states, which occur during starting and stopping of the module. This relates to module creation, parameterization and production in conjunction with the other modules.
Application-specific states (e.g. of the fieldbus or driver) can be described in their own state machines. The state machine of the TcCOM modules defines the states INIT, PREOP, SAFEOP and OP. Although the state designations are the same as under EtherCAT fieldbus, the actual states differ. When the TcCOM module implements a fieldbus driver for EtherCAT, it has two state machines (module and fieldbus state machine), which are passed through sequentially. The module state machine must have reached the operating state (OP) before the fieldbus state machine can start.
The state machine is described in detail separately.
Parameter
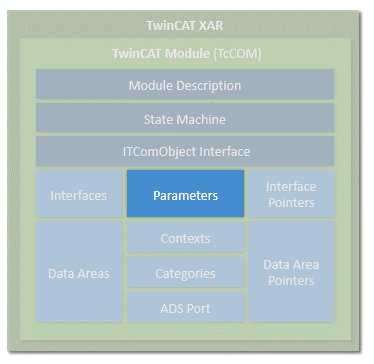
Modules can have parameters, which can be read or written during initialization or later at runtime (OP state). Each parameter is designated by a parameter ID. The uniqueness of the parameter ID can be global, limited global or module-specific. Further details can be found in the "ID Management" section. In addition to the parameter ID, the parameter contains the current data; the data type depends on the parameter and is defined unambiguously for the respective parameter ID.
Interfaces
Interfaces consist of a defined set of methods (functions), which offer modules through which they can be contacted by other modules. Interfaces are characterized by a unique ID, as described above. A module must support at least the ITComObject interface and may in addition contain as many interfaces as required. An interface reference can be queried by calling the method "TcQueryInterface" with specification of the corresponding interface ID.
Interface pointers
Interface pointers behave like the counterpart of interfaces. If a module wants to use an interface of another module, it must have an interface pointer of the corresponding interface type and ensure that it points to the other module. The methods of the other module can then be used.
Interface pointers are usually set on startup of the state machine. During the transition from INIT to PREOP (IP), the module receives the object ID of the other modules with the corresponding interface; during the transition from PREOP to SAFEOP (PS) or SAFEOP to OP (SO), the instance of the other modules is searched with the ObjectServer, and the corresponding interface is set with the Method Query interface. During the state transition in the opposite direction, i.e. from SAFEOP to PREOP (SP) or OP to SAFEOP (OS), the interface must be enabled again.
Data areas
Modules can contain data areas, which can be used by the environment (e.g. by other modules or the IO area of TwinCAT). These data areas can contain any data. They are often used for process image data (inputs and outputs). The structure of the data areas is defined in the device description of the module. If a module has data areas, which it wants to make accessible for other modules, it implements the ITcADI interface to enable access to the data. Data areas can contain symbol information, which describes the structure of the respective data area in more detail.
Data area pointer
If a module wants to access the data area of other modules, it can contain data area pointers. These are normally set during initialization of the state machine to data areas or data area sections of other modules. The access is directly to the memory area, so that corresponding protection mechanisms for competing access operations have to be implemented, if necessary. In many cases it is preferable to use a corresponding interface.
Context
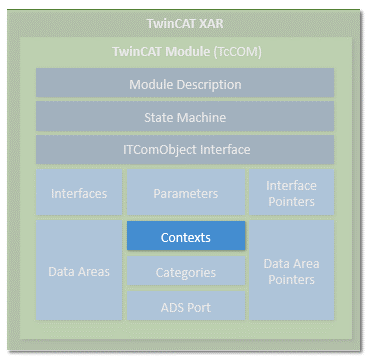
The context should be regarded as real-time task context. Context is required for the configuration of the modules, for example. Simple modules usually operate in a single time context, which therefore requires no detailed specification. Other modules may partly be active in several contexts (e.g. an EtherCAT master can support several independent real-time tasks, or a control loop can process control loops of the layer below in another cycle time). If a module has more than one time-dependent context, this must be specified the in the module description.
Categories
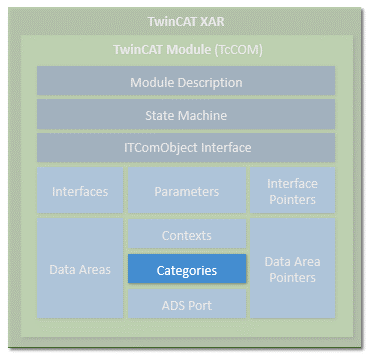
Modules can offer categories by implementing the interface ITComObjectCategory. Categories are enumerated by the ObjectServer, and objects, which use this to associated themselves with categories, can be queried by the ObjectServer (ITComObjectEnumPtr).
ADS
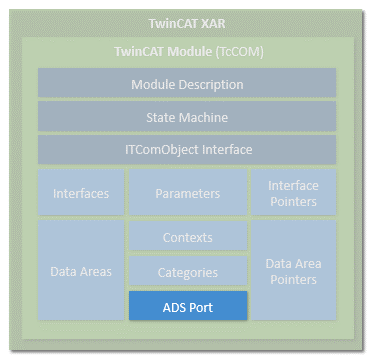
Each module that is entered in the ObjectServer can be reached via ADS. The ObjectServer uses the ITComObject interface of the modules in order to read or write parameters or to access the state machine, for example. In addition, a dedicated ADS port can be implemented, through which dedicated ADS commands can be received.
System module
In addition, the TwinCAT runtime provides a number of system modules, which make the basic runtime services available for other modules. These system modules have a fixed, constant ObjectID, through which the other modules can access it. An example for such a system module is the real-time system, which makes the basic real-time system services, i.e. generation of real-time tasks, available via the ITcRTime interface. The ADS router is also implemented as a system module, so that other modules can register their ADS port here.
Creation of modules
Modules can be created both in C++ and in IEC 61131-3. The object-oriented extensions of the TwinCAT PLC are used for this purpose. Modules from both worlds can interact via interfaces in the same way as pure C++ modules. The object-oriented extension makes the same interfaces available as in C++.
The PLC modules also register via the ObjectServer and can therefore be reached through it. PLC modules vary in terms of complexity. It makes no difference whether only a small filter module is generated or a complete PLC program is packed into a module. Due to the automation, each PLC program is a module within the meaning of TwinCAT modules. Each conventional PLC program is automatically packed into a module and registers itself with the ObjectServer and one or several task modules. Access to the process data of a PLC module (e.g. mapping with regard to a fieldbus driver) is also controlled via the defined data areas and ITcADI.
This behavior remains transparent and invisible for PLC programmers, as long as they decide to explicitly define parts of the PLC program as TwinCAT modules, so that they can be used with suitable flexibility.