Communication
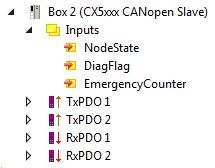
In the tree view, input variables are listed under the Inputs menu item, which provide information about a CANopen device.
The NodeState variable can be used to show the state of the CANopen communication, to indicate whether the slave is in data exchange or an error is present.
The following table shows which values the variable NodeState can assume:
Value | Meaning |
|---|---|
0 | No error |
1 | Node deactivated |
2 | Node not found |
4 | SDO syntax error at StartUp |
5 | SDO data mismatch at StartUp |
8 | Node StartUp in progress |
11 | FC510x Bus-OFF |
12 | Pre-Operational |
13 | Severe bus fault |
14 | Guarding: toggle error |
20 | TxPDO too short |
22 | Expected TxPDO is missing |
23 | Node is Operational but not all TxPDOs were received |
31 | only for EtherCAT gateways: WC-State of cyclic EtherCAT frame is 1 |
128 | Node is Operational but not all RxPDOs were received |
129 | Node is Pre-Operational |
130 | Node is Stopped |
The following table shows which values the variable DiagFlag can assume. This variable provides information on changes to the diagnostic data.
Value | Meaning |
|---|---|
0 | Data unchanged. |
1 | Data changed. Use ADS Read to read the data. |
The EmergencyCounter variable is incremented by one if an emergency telegram was received.