Options
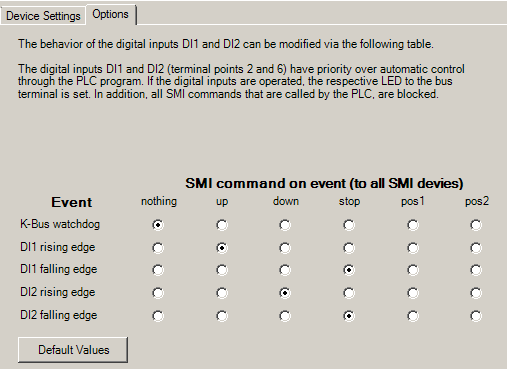
Use the Options dialog to specify commands that are executed for all SMI devices when the corresponding event occurs.
 | Input 1 and input 2, effect on automatic mode The digital inputs Input 1 and Input 2 (terminal points 2 and 6) have priority over automatic control through the PLC program. If the digital inputs are operated, other PLC-controlled SMI commands are blocked. To enable them a rising edge is required at the bResetInactiveProcessImage input of FB_KL6831KL6841Communication. See documentation TwinCAT PLC Lib:SMI. |
Event | Description |
|---|---|
K-bus watchdog | The terminal is no longer addressed by the K-bus. |
DI1 rising edge | A rising edge is present at input DI1. |
DI1 falling edge | A falling edge is present at input DI1. |
DI2 rising edge | A rising edge is present at input DI2. |
DI2 falling edge | A falling edge is present at input DI2. |
SMI commands | Description |
|---|---|
none | No command is executed. |
Up | All drives drive travel to the upper end position. |
Down | All drives drive travel to the lower end position. |
Stop | The motor operation is stopped. |
To Pos1 | The drive travels to the fixed position Pos1 that is configured on the motor side. |
To Pos2 | The drive travels to the fixed position Pos2 that is configured on the motor side. |
Default values
Use the Defaults button to restore the default settings (see image above).