Settings
KL2552 parameterization settings.
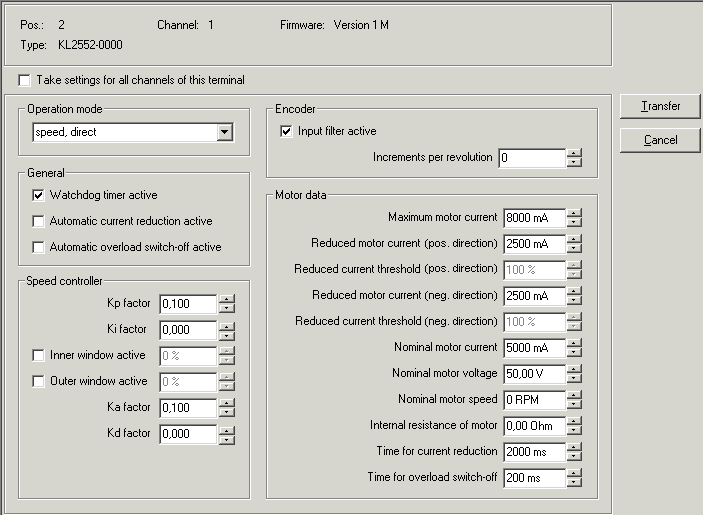
Operating mode (R33.0 - R33.3)
Here you can select the basic operating mode for the channels (default: "velocity, direct").
The terminal supports the following operating modes:
- Velocity, direct
- Velocity control
- Brake resistor (chopper)
General
Watchdog timer active (R32.2)
Here you can deactivate the watchdog (default: active). If the DC motor output stage fails to receive process data from the controller for 100 ms when the watchdog is active, the watchdog is triggered, and the motor stops.
Automatic current reduction active (R32.10)
Here you can activate automatic current reduction (default: inactive).
Automatic overload shutdown active (R32.9)
Here you can activate automatic overload shutdown (default: inactive).
Velocity controller
Kp factor (R37 only KL2552)
Here you can specify the Kp factor (proportional part) for the internal velocity control (default: 0.1).
Ki factor (R38 only KL2552)
Here you can specify the Ki factor (integral part) for the internal velocity control (default: 0).
Inner window for I-controller active (R33.4, R39 only KL2552)
Here you can activate the inner window for the I-controller (default: inactive) and the threshold from which the inner window is activated (default: 0 %).
External window for I-controller active (R33.5, R40 only KL2552)
Here you can activate the inner window for the I-controller (default: inactive) and the threshold up to which the inner window is activated (default: 0 %).
Ka factor (R54 only KL2552)
Here you can specify the Kp factor (a-part) for the internal velocity control (default: 0).
Kd factor (R55 only KL2552)
Here you can specify the Kd factor (differential part) for the internal velocity control (default: 0).
Encoder
Input filter active (R32.12)
Here you can deactivate the input filters for the encoder inputs disable (default: active).
increments per revolution (R42 only KL2552)
Here you can specify the number of increments per revolution for the connected encoder (default: 0).
Motor data
Reduced coil current (positive direction of rotation) (R41)
Here you can specify the reduced motor coil current (default: 5000 mA), see description of registers R32.10, R41 and R45.
Threshold for current reduction (positive direction of rotation) (R45)
Here you can specify the threshold from which automatic current reduction is enabled (default: 100 %).
Reduced coil current (negative direction of rotation) (R49)
Here you can specify the reduced motor coil current (default: 5000 mA), see description of registers R32.10, R49 and R48.
Threshold for current reduction (negative direction of rotation) (R48)
Here you can specify the threshold from which automatic current reduction is enabled (default: 100 %).
Time constant for current reduction (R46)
Here you can the specify time duration of the current reduction (default: 2000 ms).
Time for overload shutdown (R47)
Here you can specify the time after which the output stage is switched off, if overload occurs over the whole interval (default: 200 ms).