Travel distance control
If the travel distance control function is active (Feature.9), then a rising edge at Control.2 will result in drive to a fixed counter value. This value must previously be entered in register 0 (low word) and in register 1 (high word) at runtime.
Time t1 is specified by the ramp time constant in register 40.
The time t2 is driven through at the maximum frequency f1 (register 2).
Time t3 is determined by the ramp time constant in register 41 with which the slowing down frequency f2 (register 43) is achieved.
The specified counter value is reached on expiry of t5. The terminal switches the frequency to zero.
In order to travel to a destination with precision, it is necessary that the time constant for the falling ramp is greater than that of the rising ramp by a certain factor. This is necessary so that the slowing down frequency is reached before the final counter state, so that the terminal does not drive up to the end point at full speed.
To explain in more detail: the KL2521 calculates the number of steps that are still to be taken in time t2 from time t1 and from the number of steps that have been taken. The calculation for stopping assumes the same number of steps as that found for starting up. The downward ramp must be a little steeper, approx. 10%, so that it is possible to reach the destination exactly in the remaining time t3 + t4 + t5. This relationship changes with the maximum frequency.
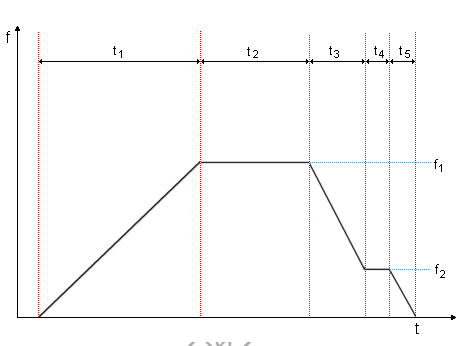 Fig.2: Phases of the travel distance control
Fig.2: Phases of the travel distance control