Enabling Distributed Clocks
Distributed clocks are a common part of EtherCAT communication. They enable distributed, absolute system synchronization for the CPU, I/O, and drive units. This enables time-based and simultaneous data processing of all distributed clocks-capable EtherCAT devices.
Principle of operation
Without distributed clocks the devices would no longer work simultaneously in extended EtherCAT networks, because EtherCAT works on the pass-through principle. In the pass-through principle, the first devices receive the EtherCAT frame first and the latter devices receive it significantly later. This would mean, for example, that all inputs could not be read at the same time or all outputs could not be set at the same time.
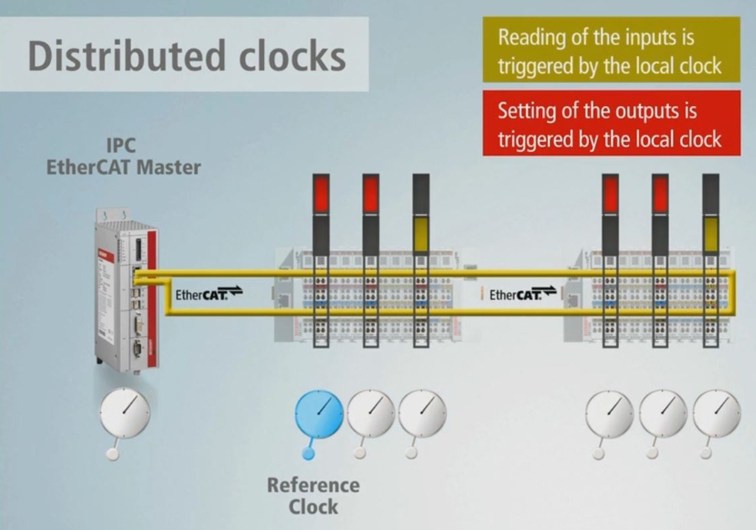 Fig.9: Example structure of an EtherCAT communication with distributed clocks.
Fig.9: Example structure of an EtherCAT communication with distributed clocks.For this purpose a distributed clock is integrated in some specially designed EtherCAT devices. This distributed clock is an electronic mechanism that runs in this device and is synchronized with other devices with distributed clocks. Hierarchically, the structure looks like this: there is a master clock or a reference clock and all other devices with distributed clocks support are then the slave clocks. The EtherCAT master sends a special telegram through the EtherCAT network in each I/O cycle, which distributes the time from the master clock to all following slave clocks. For this reason, the master clock must also be at the beginning before all other slave clocks. By default, TwinCAT therefore selects the first distributed clocks-capable device as reference clock.
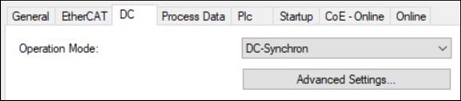 Fig.10: Distributed clocks functionality of an EtherCAT slave.
Fig.10: Distributed clocks functionality of an EtherCAT slave.Not all EtherCAT slaves support the distributed clocks method. An EtherCAT slave shows its distributed clocks functionality in TwinCAT by having a DC tab.
Example structure with FC1028
The activation of the distributed clocks is shown in a small example structure, with an FC1028 as EtherCAT master and an EK1100 EtherCAT Coupler connected to it with EtherCAT Terminals, including two terminals with distributed clocks functionality.
Activate the distributed clocks as follows:
- 1. Click on the first EtherCAT slave with distributed clocks support on the left side in the tree view. In this example it is the EL4032.
- 2. Click the DC tab and select the DC-Synchron option under Operation Mode.
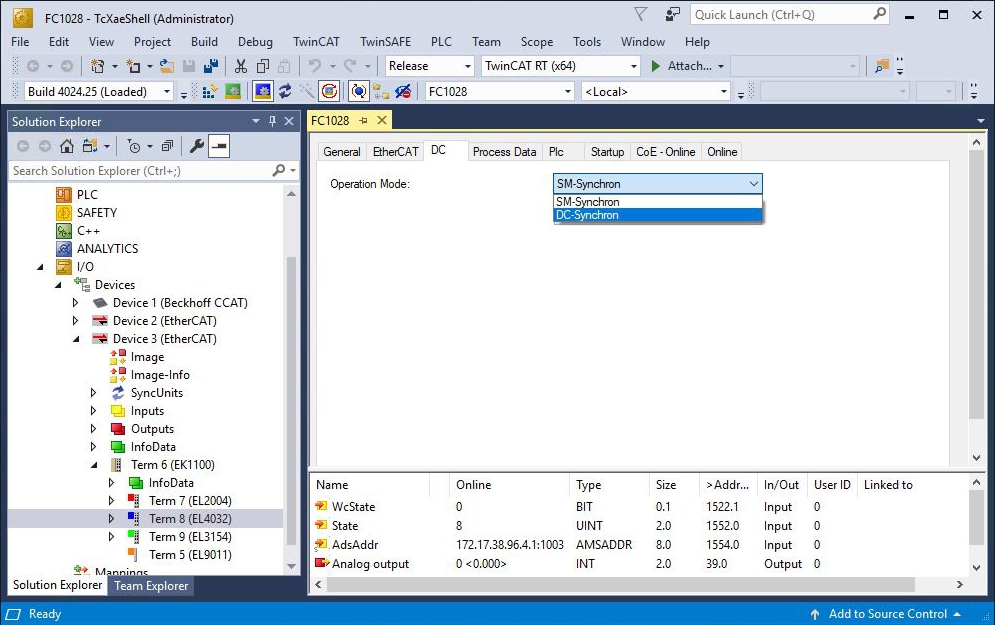
Since it is the first EtherCAT device with distributed clocks support in this example, this EtherCAT device is used as reference clock for all subsequent EtherCAT devices. - 3. Activate further EtherCAT devices with distributed clocks support in your system as shown.
- 4. Click on the EtherCAT master on the left in the tree view and then on the Advanced Settings button in the EtherCAT tab.
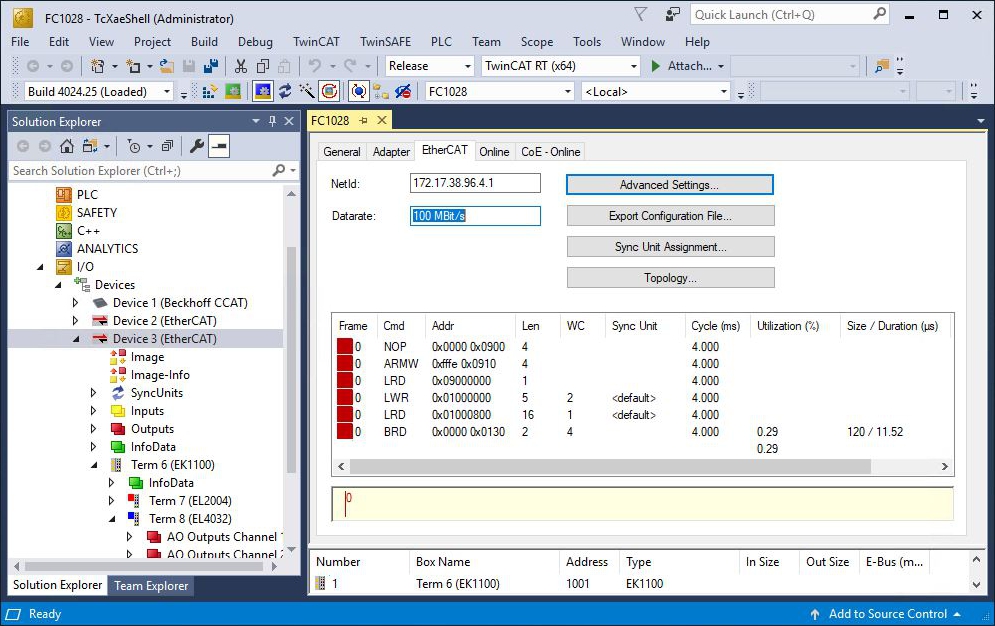
- 5. The EL4032 EtherCAT Terminal is automatically adopted by TwinCAT as master clock or reference clock.
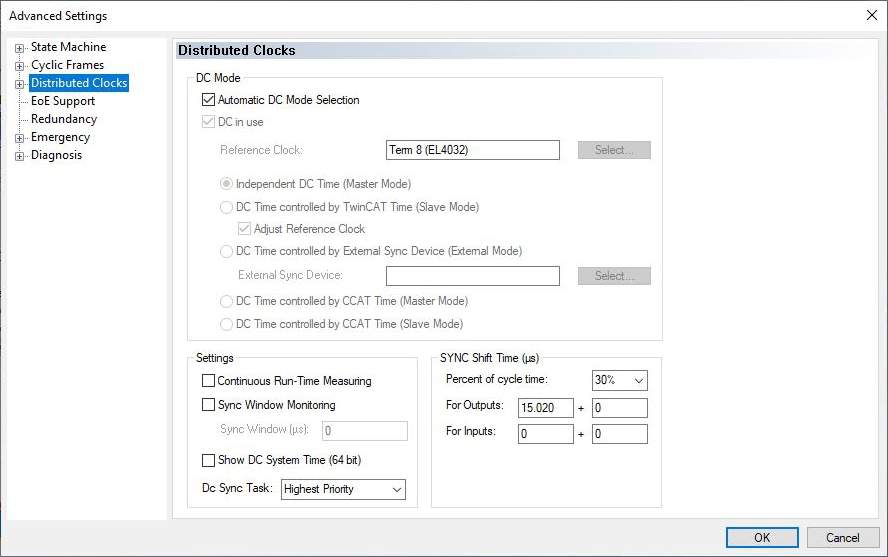
- This means that the distributed clocks functionality is active in this example.