EtherCAT data exchange
A range of components are available for implementing direct synchronous data exchange between two EtherCAT systems. Depending on the application requirements, the appropriate method can be selected based on the following criteria. The characteristic features are:
- synchronous data exchange with predefined process data that are specified in the configuration
- asynchronous data exchange
- support for ADS over EtherCAT (AoE)
- support for synchronization of the distributed clocks (DC) in the two systems
Some characteristics are listed in the following table. This information is only intended as a guide. The actual specification can be found in the respective online component documentation.
| EL6692 | Publisher / subscriber | EL6601 | FC1100 | CX50x0-B110 |
|---|---|---|---|---|---|
Maximum synchronous data quantity | 480 bytes, bidirectional | unlimited | 1024 bytes, bidirectional (publisher/subscriber method) | 1024 bytes, bidirectional |
|
Maximum asynchronous data quantity | - | - | unlimited | - |
|
AoE support | yes | yes | - | yes | yes |
DC support | yes | - | - | - | - |
Note |
|
|
|
|
|
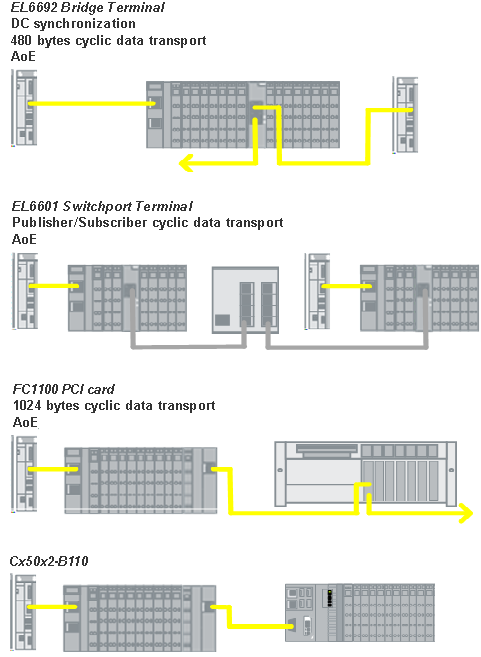 Fig.249: Topologies for different data exchange methods
Fig.249: Topologies for different data exchange methods