Configuration example
PDO Mapping
The process data on the EtherCAT side are described via the PDO mapping. The individual terminals bring along a pre-defined PDO mapping, i.e. a practical combination of individual PDOs, via the ESI file (EtherCAT description file).
These combinations are described in turn on the PROFINET side using different sub modules and thus process data; i.e. each pre-defined PDO mapping has an associated submodule.
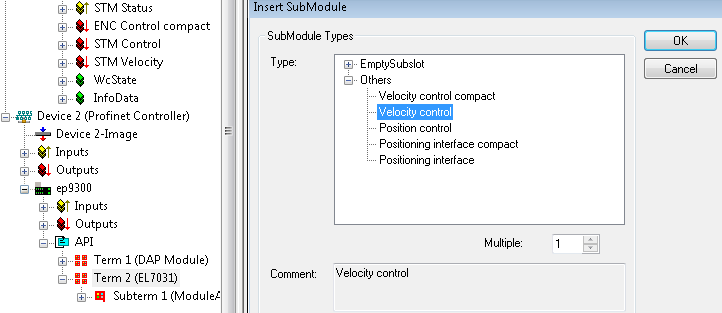
Such modular terminals always have a fixed sub module plugged into sub slot 1 on the EP9300. This is the placeholder for the terminal itself; i.e. the generally valid diagnosis for the terminal is operated via this. The actual process data are plugged into sub slot 2 and the PDO mapping on the EC-master is generated on their basis.
SDO Mapping
Each of the plugged-in sub slots can bring along parameterization data. The Service Data Objects (SDOs) are transmitted via these data, i.e. the SDOs are mapped to record data sets. The objects 0x8xxx and 0xF8xx are always mapped. Since the indices on the Profinet side are only vendor-specific from 0 - 0x7FFF, the EtherCAT objects 0x8xxx correspond to the Profinet record indices 0x3xxx and the EC objects 0xF8xx to the Profinet index range 0x48xx. In Profinet the records are always written during the controller start-up phase; they are transferred internally to the EtherCAT master as start-up SDOs. This means that the internal EtherCAT master is also restarted during a PROFINET restart.
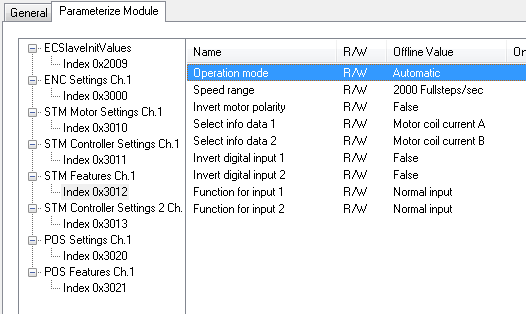
These data records can also be read and written during operation.
Commissioning EL7031
The default settings are adequate for initial commissioning, i.e. only the corresponding sub module needs to be selected. The PDOs and SDOs of the terminal are parameterized on that basis. For example, if the “Velocity Control” sub module is selected, only the Control_Enable bit needs to be set; subsequently turn the motor by specifying a setpoint speed.