Basic function principles
The EtherCAT star hub EP9128 is an infrastructure device without controllable input/output data (I/O).
It can be used
- as a junction point for conducted Fast Ethernet, in order to connect EtherCAT terminal stations, drives or any other EtherCAT slaves to drop lines
- as distributed clocks reference clock (see EtherCAT System Documentation)
It has no I/O and no CoE directory and is not parameterizable. The core functions of the link control and distributed clocks synchronization are mapped by the ESCs.
Structure
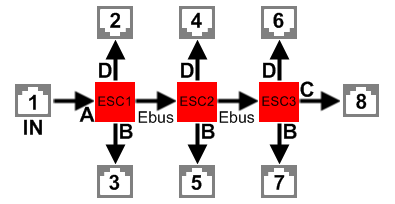
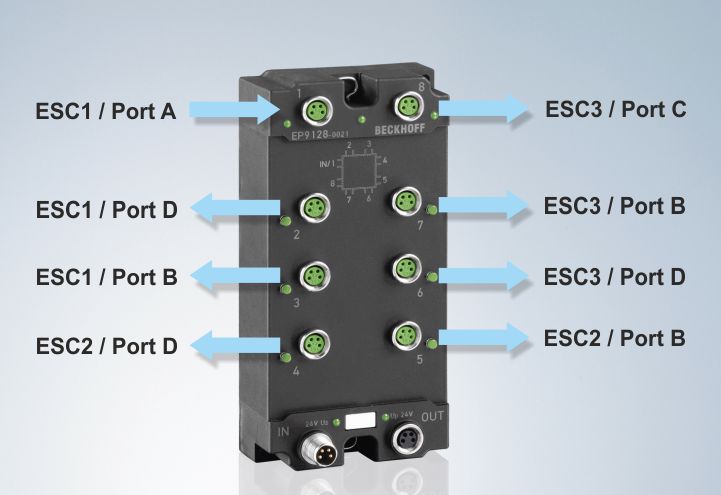
In order to provide eight EtherCAT ports, the EP9128 has 3 internal communication ICs (ESCs), which are connected in series internally. For this reason the EP9128 appears as three individual slaves in the EtherCAT configurator, although they are located in one housing. The interrelationship between the internal ESC ports (A, B, C, D) and the descriptions of the connection sockets (1 to 8) is as follows:
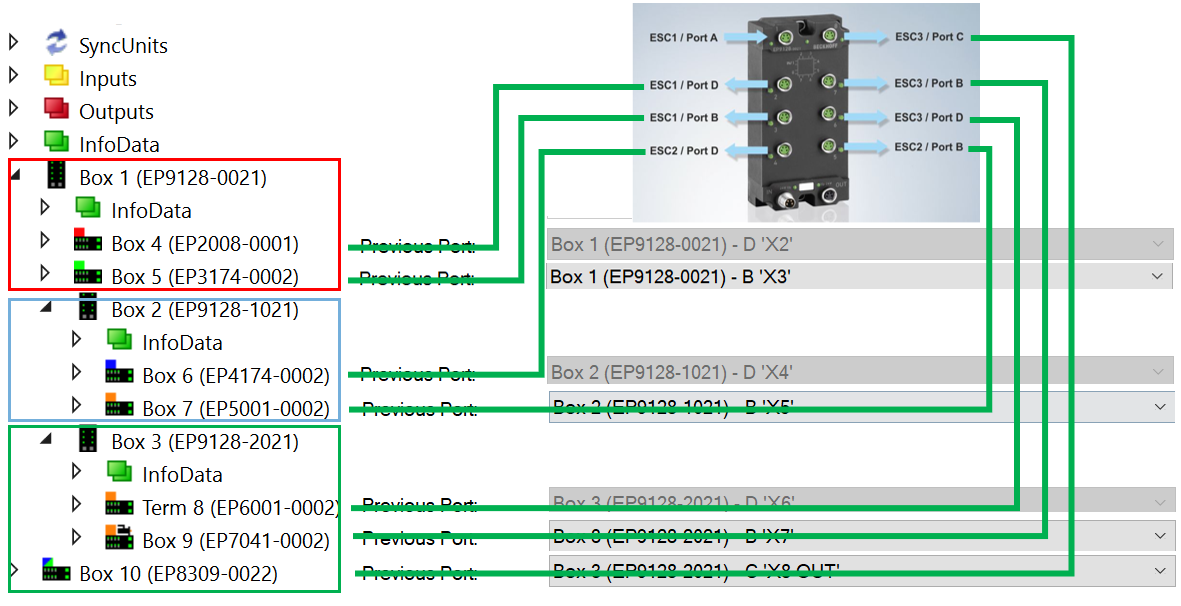
In TwinCAT each ESC is represented as an individual device. Therefore, the EP9128 is displayed as three devices in the Solution Explorer:
Please note:
- port 1 is always the input for the EtherCAT traffic in the EP9128
- the other ports 2 to 7 should be used as outputs
- it is not permitted to delete subdevices once the EP9128-0021 has been configured
For differentiation see also EEPROM Update.
Topological configuration
With the EP9128, special attention should be paid to the sequence of the EtherCAT slaves. Since the EP9128 has seven junction ports, drop lines connected to ports must and can be clearly identified in practice. If incorrect information is provided in the configuration (TwinCAT System Manager file *.tsm), the system cannot start.
For each EtherCAT device the System Manager indicates at which PreviousPort it is connected, i.e. the name of the connected port (B to D) of the previous slave. This also applies for the internal connections between the ESCs in the EP9128:
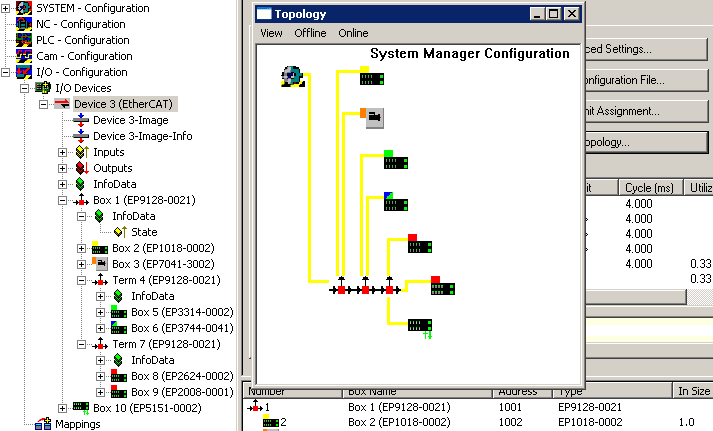
The Fig. above shows a topology as an example, with
- EP1018-0002 at port 2
- EP7041-3002 at port 3
- EP3314-002 at port 4
- EP3744-0041 at port 5
- EP2624-0002 at port 6
- EP2008-0001 at port 7 und
- EP5151-0002 at port 8
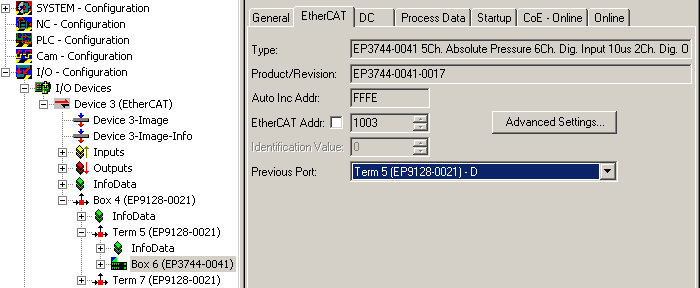
In the Fig. above the box 6 successor is set up at port 5, which means the PreviousPort selection of the EP3744 shows the free port D of ESC2 (B and D, see Fig. EP9128 diagram).
The internal connections in the EP9128 are E-bus connections, the 8 ports on the other hand are Ethernet, see Fig. EP9128 diagram.