Timestamp
With this method, the digital input works only event-based. Two pieces of information are saved for each edge change detected: the current input state 0/1 after the edge change and the exact time of the edge change, the timestamp. The time is derived from the synchronized EtherCAT distributed clocks system, which synchronizes all capable EtherCAT devices in the network to a time accuracy of << 1 µs without special configuration (for further information see Basic EtherCAT documentation).
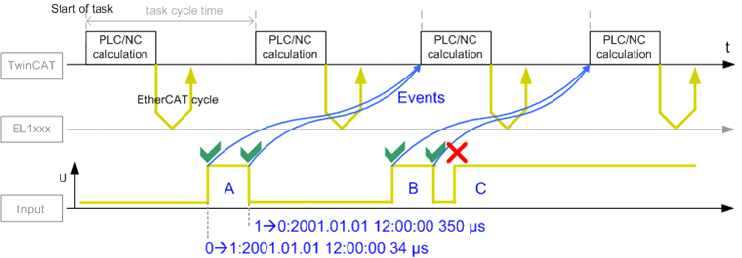
In this figure, the rising and falling edges of pulse A are now recorded as events, each with a timestamp, and transmitted to the controller via the EtherCAT cycle. The temporal resolution is 1 ns here – an ‘infinitely’ fine time resolution in mechanical terms. The device only saves one falling and one rising edge per cycle. If several edge changes occur, such as the rising edge of pulse C, the first or last event is saved, depending on the configuration.