Process data overview
Process data outputs
PDO | Member | Data type | Pos. | Meaning | |
|---|---|---|---|---|---|
DO Group m Outputs | Outputs Channel m | Y1 | BIT | 0 | Make contact X1, X2 → Y1 switch through |
Y2 | BIT | 0 | Make contact X1, X2 → Y2 switch through | ||
Y3 | BIT | 0 | Make contact X1, X2 → Y3 switch through | ||
Y4 | BIT | 0 | Make contact X1, X2 → Y4 switch through | ||
Process data inputs
PDO | Member | Data type | Pos. | Meaning | |
|---|---|---|---|---|---|
DO Inputs Device | Device Status | Error | BIT | 0 | Error within the channel, for details see further status bits or DiagnoseHistory |
Diag | BIT | 4 | There is a DiagMessage in the CoE 0x10F3, it can be read from the terminal, e.g. via the TwinCAT Logger | ||
Input cycle counter | BIT2 | 6, 7 | Increments by 1 in each EtherCAT cycle, 0... 3. The controller can monitor this counter. If it does not increment by 1 in a cycle, this indicates a transmission error during this cycle. If necessary, adjust the ShiftTime in Distributed Clocks mode.
| ||
WcState | WcState | BIT | 0 | TRUE: The terminal does not participate in the EtherCAT data exchange, because it is not present or incorrectly configured FALSE: The terminal regularly participates in the data exchange. Check the validity of the data with the respective status etc. | |
InputToggle | BIT | 0 | Toggles 0/1 when the slave sends new data via EtherCAT | ||
PDO | Member | Data type | Pos. | Meaning | |
|---|---|---|---|---|---|
InfoData | State | UINT | 0 | State of the EtherCAT state machine: INIT, PreOP, SafeOP, OP | |
AdsAddr | netId | AMSNETID | 0 | ADS address (NetID/port) through which the CoE of the slave can be reached from the application | |
port | WORD | 0 | |||
DcOutputShift | DINT | 0 | ~Time between SYNC0 event and reading of the outputs (in ns, only DC mode) | ||
DcInputShift | DINT | 0 | ~Time between SYNC0 event and reading of the inputs (in ns, only DC mode) | ||
Structure of the process data (TwinCAT 3) ELM264x/ ELM274x:
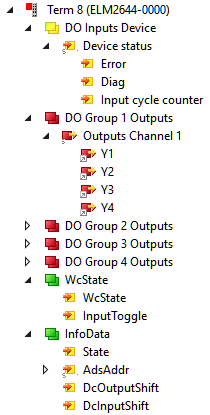 Fig.8: PDO of the ELM2644 valid for ELM2642, ELM274x and EL2642, too (according to the number of channels)
Fig.8: PDO of the ELM2644 valid for ELM2642, ELM274x and EL2642, too (according to the number of channels)