Basics incremental encoder
Channels A and B record the digital output signals of an incremental encoder that are phase-shifted by 90°. These signals are converted into a position value with quadruple evaluation with the aid of the quadrature decoder and the 32-bit counter. The latch and reset functions enable the exact referencing and saving of the counter value, irrespective of the speed.
Incremental encoders divide a 360° rotation of the encoder axis into individual steps (increments).
The phase position between the signals on channel A and channel B determines the counting direction.
Forward: signal on channel A leads signal on channel B by 90°
Backward: signal on channel A lags signal on channel B by 90°.
In case of single evaluation, the rising edges on channel A are counted.
In case of quadruple evaluation, the rising and falling edges on channel A and channel B are counted.
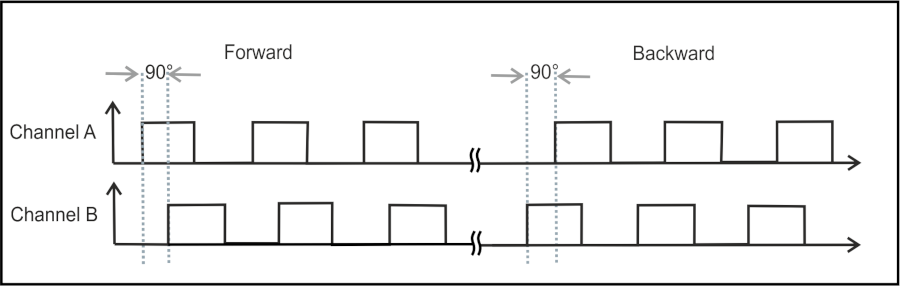 Fig.9: Quadrature decoder
Fig.9: Quadrature decoderWhereas absolute value encoders deliver an absolute and unambiguous position value over the complete travel path directly after switching on, it is necessary with incremental encoders to perform homing (TwinCAT 2: TX1270 | TwinCAT CNC, TwinCAT 3: TF5200 | TwinCAT 3 CNC – Homing) after switching on in order to be able to determine an unambiguous position.
Referencing can be carried out, for example, with the aid of referencing cams or using the zero pulse of the encoder.