Commissioning in TwinCAT 3
With the following steps you configure an EL7411 in TwinCAT 3 for the operation with Drive Motion Control.
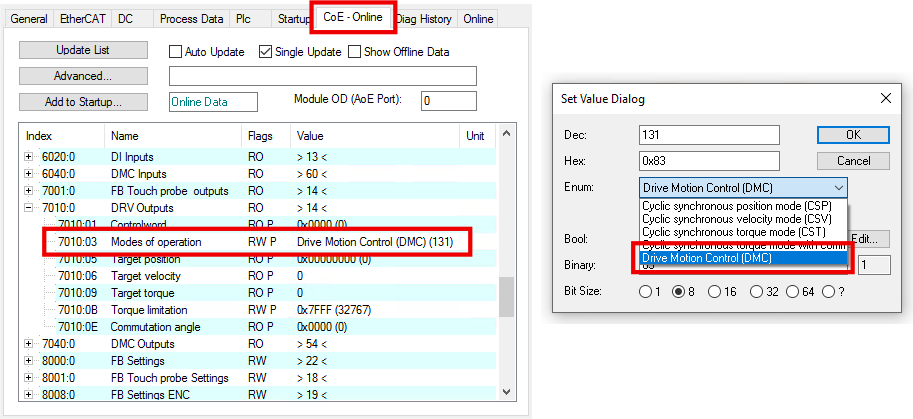
- 1. In the CoE parameter 0x7010:03 "Modes of operation" set the operation mode "Drive Motion Control (DMC)".
- 2. Activate the Predefined PDO Assignment "Drive motion control (For TC3 DriveMotionControl Lib)".
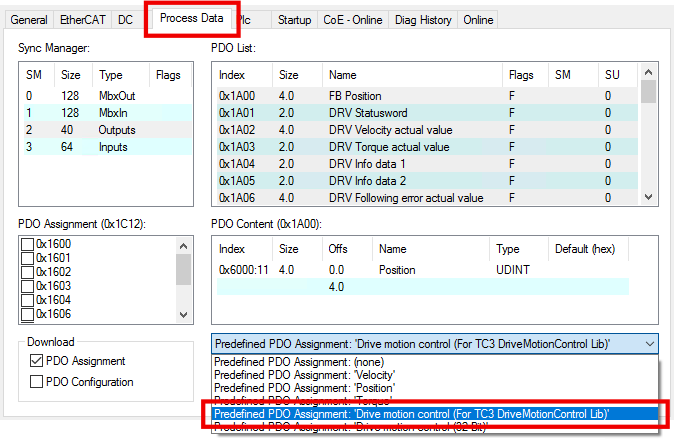
- The process data for using Drive Motion Control is activated.
- 3. Create a PLC project if none has been created yet.
- 4. Add the library "Tc3_DriveMotionControl" to the PLC project.
(If you want to use Drive Motion Control without the library "Tc3_DriveMotionControl", see chapter State machine.)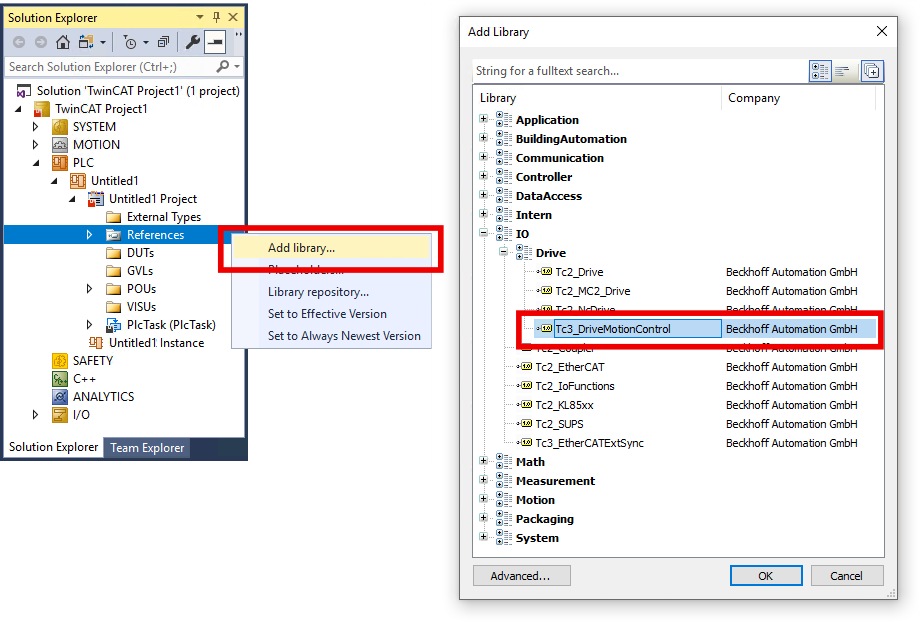
- 5. If the libraries "Tc3_DriveMotionControl" and "Tc2_Mc2" are used simultaneously in the current project:
In the window "Properties" of one of the two libraries, set the property "Qualified access only" to "True".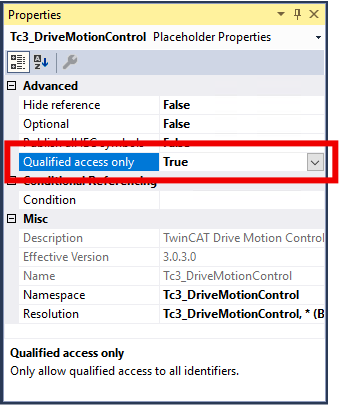
- The library with "Qualified access only" can now only be addressed in the PLC code via the corresponding namespace, e.g.:
Tc3_DriveMotionControl.MC_Stop()
This avoids name conflicts, e.g. when calling the function blockMC_Stop, which has the same name in both libraries. - 6. Declare a variable of type "AXIS_REF" in the PLC. Sample:
VAR
DmcAxis: AXIS_REF;
END_VAR - 7. Click on "Build" > "Build Solution" in the menu bar.
- The project is compiled.
- The process image of the PLC task is generated.
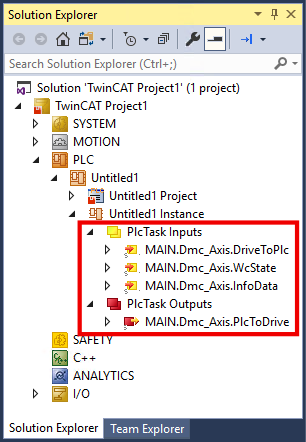
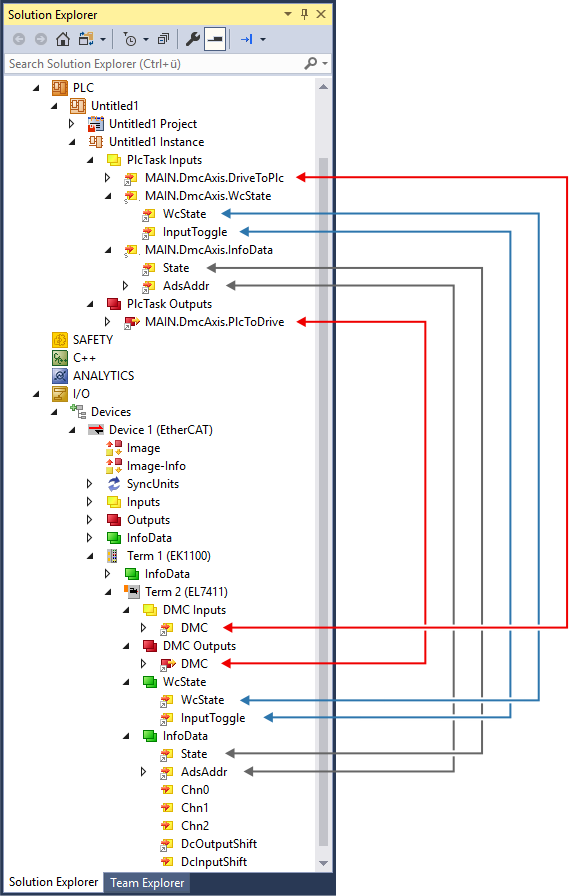
- 8. In the Solution Explorer link the PLC variables with the process data of EL7411.
- 9. In the PLC code, call the function block
ReadStatus()cyclically, ideally at the beginning of each PLC cycle.
Further Information