Integration into the NC configuration (manually)
(Master: TwinCAT 2.11)
 | EtherCAT XML Device Description The display matches that of the CoE objects from the EtherCAT XML Device Description. We recommend downloading the latest XML file from the download area of the Beckhoff website and installing it according to installation instructions. |
Integration into the NC can be accomplished as follows:
- The terminal must already have been added manually under I/O devices or have been scanned in by the system (see chapter Configuration set-up in TwinCAT).
- First add a new task. Right-click on NC configuration and select "Append Task..." (see Fig. Adding a new task).
- Rename the task if required and confirm with OK.
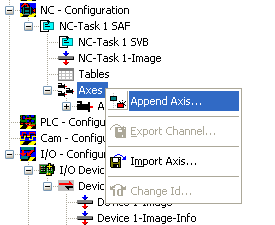
- Right-click on Axes, then add a new axis (see Fig. Adding a new axis).
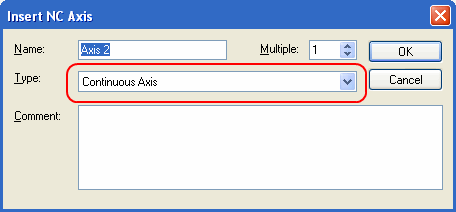
- Select Continuous Axis type and confirm with OK (see Fig. Selecting and confirming the axis type).
- Left-click your axis to select it. Under the Settings tab select "Link To..." (see Fig. Linking the axis with the terminal).
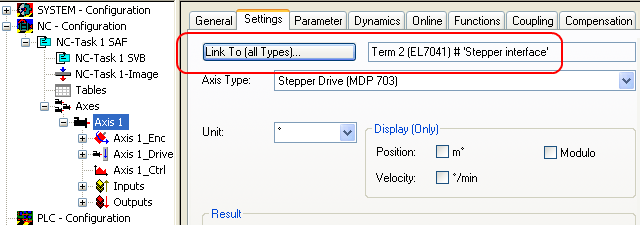
Linking the axis with the terminal
- Select the right terminal (DC Drive (MDP 733)) and confirm with OK. Note that each terminal can drive two motors. Select the channel that you have connected.
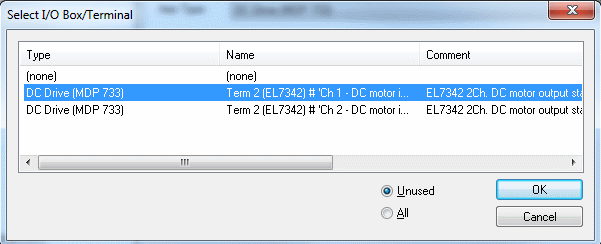
Selecting the right terminal
- All main links between the NC configuration and the terminal are set automatically (see Fig. "Automatic linking of all main variables")
Several parameters have to be set before the motor can be started up. The values can be found in chapter Configuration of the main parameters.
Please set these parameters before continuing with the motor commissioning procedure.